
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока щенйя при изменении момента сопротивления в определенных пределах. Изменение синхронной скорости вращения ротора этих двигателей возможно только переключением обмоток статора на другое число пар полюсов. Следует отметить, что свойством полисинхронизма, т. е. способностью одного и того же двигателя работать при различном числе полнхов обмотки статора, среди синхронных обладают только гистерезисные микродвигатели. У них число полюсных зон на роторе автоматически получается равным числу полюсов на статоре. Во всех остальных синхронных микродвигателях число полюсов на роторе фиксируется конструктивно. Двигатели второго типа рассчитаны на плавное или дискретное регулирование синхронной скорости вращения ротора за счет изменения частоты питающей сети. Двигатели с плавным регулированием частоты применяют в основном в системах синхронной связи. К синхронным микродвигателям, используемым в системах звукозаписи, звуковоспроизведения и т. д., предъявляются жесткие требования по уровню создаваемых звуковых шумов. Для сравнения различных синхронных микродвигателей по этому показателю выделим основные причины шумов. . Шумы механического происхождения возникают в результате вибраций за счет динамического небаланса ротора, работы подшипников и скользящих, контактов. Шумы аэродинамического происхождения появляются в результате воздушных завихрений при вращении ротора. Шумымагнитного происхождения возникают в результате вибраций магнитопровода под действием переменных электромагнитных сил, обусловленных в основном изменением магнитного сопротивления потоку вдоль окружности ротора. В соответствии с изложенным наименьший уровень шумов может быть достигнут у гистерезисных микродвигателей, имеющих симметричный в механическом и магнитном отношении ротор с гладкой поверхностью. Наибольший уровень шумов у реактивных микродвигателей с явнополюсным ротором (рис. 2.46, а). Наиболее высокие энергетические показатели (к. п. д. т) и коэффициент мощности созф) и наименьший вес q на единицу номинальной мощности имеют микродвигатели активного типа с постоянными магнитами. При частоте напряжения питания 50 Гц в диапазоне мощностей 10-ь100 Вт т)=40--80% (меньшие значения относятся к двигателям меньшей мсяцности). Затем идут гистерезисные микродвигатели, режим которых, как указывалось, соответствует работе синхронной машины с недовозбуждением. При тех же условиях их т]=30-50%. Наихудшие показатели имеют реактивные микродвигатели, у которых поток возбуждения ротора вообще отсутствует. В указанных условиях их т)=20-ь40%. Коэффициент мощности созф существенно зависит от схемы включения двигателя: трехфазной или однофазной с конденсатором. Коэффициент мощности, весьма низкий из-за собственных свойств у реактивных и гистерезисных микродвигателей (порядка 0,3-0,5 в трехфазном режиме), в конденсаторной схеме включения выше и примерйо такой же, как у микродвигателей с постоянными магнитами (порядка 0,6-ь 0,9). Синхронные микродвигатели, предназначенные для работы от сети с повышенной частотой (400 и 1000 Гц), могут иметь лучшие показатели к. п. д. и веса, чем при частоте 50 Гц. На рис. 2.57 приведены энергетические и весовые показатели некоторых серийных синхронных микродвигателей. Синхронные микродвигатели часто используют в технологическом оборудовании и бытовых приборах в качестве двигателей общего при- 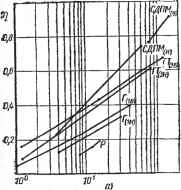 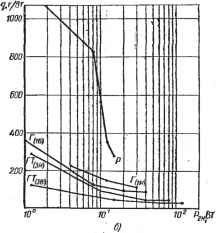 10 РгВт Рис. 2.57. Зависимость к. п. д. (а) и веса на единицу номинальной мощности (б) от номинальной мощности синхронных микродвигателей: СДЯМ - активного типа с постоянными магнитами; Г. ГГ ~ гистерезисные; (Н> - частота SO Гц; (В)-частота 400 Гц; (3) - трехфазная схема включения, (/)-однофазная схема включения; Р - реактивные менения. Из рассмотренных синхронных микродвигателей наиболее простые по конструкции и технологии изготовления и сравнительно дешевые в производстве реактивные микродвигатели, которые выполняют из недорогих магнитномягких материалов. § 2.10. РАВНОМЕРНОСТЬ ВРАЩЕНИЯ РОТОРОВ СИНХРОННЫХ МИКРОДВИГАТЕЛЕЙ К синхронным микродвигателям, работающим в приборах высокой точности, часто предъявляется требование стабильности не только средней, но и мгновенной скорости вращения ротора. Средняя скорость вращения роторов cozcp синхронных микродвигателей при заданной частоте напряжения сети - величина-постоянная и равна (или кратна) средней скорости вращения магнитного поля coi. При этом мгновенная скорость вращения ротора сог может колебаться в пределах одного оборота относительно средней скорости (рис. 2.58, а). Так как ротор вращается неравномерно, то действительное угловое положение выходного конца вала а в момент времени t отличается от расчетного ор = югср t (рис. 2.58, б). Угловая ошибка Да наиболее опасна в случае работы микродвигателей в системах передачи или преобразования угловых перемещений, Колебания мгновенной скорости вращения иногда называют качанием ротора синхроииого двигателя. Для пояснения этого процесса рассмотрим работу синхронного микродвигателя, ротор которого вращается с постоянной средней скоростью, равной скорости поля (согср == coi), при ступенчатом изменении момента сопротивления (рис. 2.59). 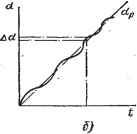 Рис. 2.58. Колебания мгновенной скорости и угла поворота ротора во времени У всех типов синхронных микродвигателей электромагнитный синхронизирую-гций момент Мс, развиваемый в синхронном режиме, является функцией угла между осью потока статора и продольной осью ротора. При моменте сопротивления на валу Men продольная ось ротора смещена относительно оси потока статора на некоторый угол Yi. при котором момент Mcf развиваемый двигателем, равен моменту сопротивления (Mc=A1cti)- В случае умень-щения момен-а сопротивления (Mct2<cti) момент двигателя станет больше момента сопротивления, мгновенная скорость ротора несколько возрастет (+ДСО2) и продольная ось ротора приблизится к оси потока статора - угол Y уменьшится. Мсменту сопротивления УИстг соответствует новое установившееся угловое положение ротора у2, при котором Мс=Мст2- Однако вследствие момента инерции ротор не займет сразу положение Ys. а проскочит его и продольная ось ротора приблизится к оси потока статора на угол Y2<Y2- При этом момент двигателя будет меньше момента сопротивления (Мс < Лстг)- Мгновенная скорость ротора начнет несколько уменьшаться (-Ащ), а угол Y увеличиваться вплоть до Yz-Это значит, что ротор будет некоторое время колебаться около углового положения Y2 и его мгновенная скорость будет меняться. В общем случае можно выделить три группы причин, вызывающих неравномерность вращения роторов синхронных микродвигателей: I) переменные электро-магнитиые силы в двигателе, 2) переменные механические силы в двигателе, 3) внешние факторы. Переменные электромагнитные силы в двигателе возникают в основном из-за эллиптичности вращающегося магнитного поля, несинусоидального распределения магнитной индукции вдоль окружности воздушного зазора и неравномерной магнитной проводимости по различным осям реального двигателя. Эллиптичность вращающегося поля может быть вызвана несимметриеи 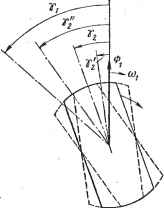 Рис. 2.59. Пояснение процесса качания ротора синхронного двигателя
|