
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока 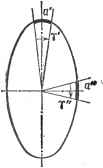 напряжения питания, включением конденсатора в цепь одной из фаз при однофазном питании и асимметрией фазных м. д. с. обмотки статора вследствие неравенства сопротивлений или чисел витков в фазах. При неизменной линейной скорости конца вектора поля угловая скорость вращения эллиптического поля, а значит, и мгновенная скорость ротора в пределах оборота не являются постоянными (рис. 2.60). Несинусоидальное распределение магнитной индукции вдоль окружности воздушного зазора может быть следствием иесинусоидального закона распределения м. д. с, насыщения, неравномерности воздушного зазора (эллиптичность статора или ротора, эксцентриситет, пазы на поверхности и т. д.) или неоднородности магнитного материала. В воздушном зазоре возникают высшие пространственные гармоники статора и ротора. Скорости вращения полей высших гармоник зависят от их порядка. При взаимодействии высших гармоник полей статора и ротора вращающихся с разной скоростью, возникают синхронные моменты, среднее значение которых равно нулю, а мгновенное пульсирует по синусоидальному закону с частотой, равной разности частот вращения взаимодействующих полей (как при выходе синхронной машины из синхронизма). Это приводит к колебаниям мгновенной скорости вращения ротора с соответствующей частотой. Наличие зубцов на поверхности статора и ротора обусловливает появление зубцовых реактивных моментов, так как магнитное сопротивление Rm на пути потока является функцией углового положения ротора относительно статора (рис. 2.61). Пульсации зубиоБых реактивных моментов при вращений ротора вызывают соответствующие колебании его мгновенной скорости. Переменные механические силы в двигателе вызываются конструктивными, технологическими и эксплуатационными факторами. Так, например, неточная балансировка ротора приводит к возникновению переменных динамических сил. Неправильная посадка подшипников на вал вызывает местные деформации и тормозные моменты. Изменение температуры приводит к неравномерной деформации отдельных частей двигателя, разбалансировке ротора и т. д. Основными внешними факторами, влияющими на степень неравномерности вращения роторов синхронных микродвигателей, являются колебания напряжения питания и величины нагрузки, а также несинусо-ндальность напряжения питания. Колебания амплитуды напряжения птгания приводят к изменению магнитного потока статора и, как следствие, вращающего момента, развиваемого двигателем. Нарушается равновесие моментов вращения и сопротивления на валу двигателя и начинается процесс качания ротора. Таков же эффект от колебания момента нагрузки на валу двигателя. В результате несинусоидальности напряжения питания появляются высшие временные гармоники вращающегося поля. Их скорость вращения отличается от скорости вращения ротора, что приводит к возникновению пульсирующих моментов. Последние, как и моменты от высших пространственных гармоник, нарушают равномерность вращения ротора. Повышение равномерности вращеппя роторов синхронных микродвигателей осуществляют по двум основным направлениям: совершенстБОвание конструкции и технологии изготовления самих двигате-целью устранения причин, вызывающих колебания мгновещюй скорости Рис. 2.60. Изменение мгнове.чной угловой аторостн эллиптического поля (tt : аа : \<\ ; &\<&\ ; 2< 2) i mln R, 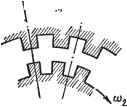 Рис. 2.61. Влияние зубчатости поверхностей статора и ротора на магнитное сопротивление лей с ротора; 2) стабилизация мгновенной скорости вращения путем применения электронных схем. Степень равномерности врения роторов синхронных микродвигателей весьма сильно зависит от величины удельного синхронизирующего момента, параметров короткозамкнутой обмотки типа беличьей клетки (если она имеется) и момента инерции ротора. Удельный синхронизирующий момент Муц синхронного микродвигателя-это момент, приходящийся на одни геометрический градус угла рассогласования у между осями поля статора и ротора при значениях у, близких к нулю, \ Ду Jv o (2.69) Очевидно, чем больше при прочих равных условиях удельный момент /Иуд, тем меньше амплитуда колебаний углового положения ротора Ду при одинаковом возмущении по моменту. Д/И (рис. 2.62, а; Л1уд1>Л1уд2). Увеличение удельного момента может быть достигнуто, в частности, за счет увеличения числа пар полюсов двигателя (рис. 2.62, б). 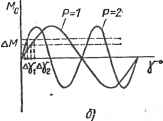 а) Рис. 2.62. Угловые характеристики синхронных микродвигателей Короткозамкнутая пусковая обмотка, расположенная на роторе синхронных микродвига-телей активного и реактивного типа, в синхронном режиме является электрическим демпфером. При изменениях мгновенной скорости ротора в коротко-замкнутой обмотке наводятся токи, создающие во взаимодействии с вызвавшим их магнитным полем демпфирующий асинхронный момент. Правильный выбор параметров короткозамкнутой обмотки может обеспечить существенное уменьшение амплитуды колебаний скорости ротора. Момент инерции ротора и нагрузки следует выбирать так, чтобы сдвинуть резо- ансную частоту двигателя от частоты наиболее опасных переменных сил. Для количественной оценки равномерности скорости вращения ротора вводится понятие нестабильности мгновенной скорости вращения ротора, которая равна отношению максимального перепада скорости к ее среднему значению (см. рис. 2.58. а): в общем случае изменение угла у и скорости Юг происходит не по гармоническому закону. Для основной (первой) гармоники ка>-аний ротора взаимосвязь нестабильности мгновенной скорости и амплитуды угловьих колебаний описывается сравнительно простым выражением fl9J: гяушпах (2.71) 21 600А Здесь Yimax - амплитуда угловых колебаний в угловых минутах; тде Тк - период первой гармоники колебаний; Гц - период оборота ротора. Синхронные микродвигатели активного типа с постоянными магнитами и короткозамкнутой обмоткой типа беличьей клетки на роторе имеют наименьшую нестабильность скорости. Объясняется это тем, что наличие собственного потока возбуждения ротора обеспечивает выбокое значение удельного синхронизирующего момента, а короткозамкнутая обмотка при правильном выборе ее параметров оказывает сильное демпфирующее действие. Синхронные гистерезисные микродвигатели имеют ббльшую нестабильность скорости, так как у них на роторе нет короткозамкнутой обмотки. Нестабильность мгновенной а<орости вращения роторов синхронных реактивных микродвигателей также больше, чем у двигателей с постоянными магнитами, несмотря на наличие короткозамкнутой обмотки ротора. Объясняется это сильным действием моментов высших пространственных гармоник магнитного поля и зубцовых реактивных моментов благодаря особенностям конструкции ротора. В табл. 2.1 приведены ориентировочные показатели нестабильности скорости ротора различных типов синхронных микродвигателей в диапазоне мощностей от единиц до нескольких десятков ватт [19], Таблица 2.1
§ 2.11. СИНХРОННЫЕ МИКРОДВИГАТЕЛИ НЕПРЕРЫВНОГО ВРАЩЕНИЯ С ПОНИЖЕННОЙ СКОРОСТЬЮ ВРАЩЕНИЯ РОТОРА Существзет проблема получения низких скоростей вращения ротора у синхронных микродвигателей стандартной частоты без применения промежуточных механических редукторов. Синхронные микродвигатели классического типа, рассмотренные в § 2.9, при стандартной частоте напряжения питания 50, 400 и 1000 Гц развивают скорость вращения ротора порядка I тыс. об/мин и более. В автоматических системах и приборах скорость вращения часто требзется только в несколько единиц или десятков оборотов в минуту. Применение для снижения скорости механических редукторов со столь значительным передаточным отношением усложняет систему микропривода, снижает общую надежность, повышает уровень звуковых шумов, габариты и вес. Кроме того, при работе в ряде устройств, например в условиях вакуума или высоких температур, надежность микродвигателей, имеющих быстровращающиеся подшипники, резко падает. В синхронных микродвигателях, рассматриваемых в настоящем параграфе, скорость вращения ротора не равна, а меньше скорости вращения поля статора в определенное число раз. При этом соотношение скоростей в синхронном режиме-не зависит от внешних факторов (момента нагрузки, напряжения и т. д.). Такое редуцирование скорости достигается либо за счет внутренних воз.можностей синхро:ь
|