
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока шению нестаоильности мгновенной скорости вращения ротора (формула 2.72 § 2.10). У реактивных редукторных микродвигателей нестабильность достигает Л = (40-ь80)-10-. i Микродвигатели с катящимся ротором В синхронных микродвигателях с катящимся ротором редуци- рование скорости вращения ротора по отношению к скорости магнитного поля объясняется те.м, что ротор располагается эксцентрически в расточке статора и имеет возможность катиться вдоль окружности статора. Основной электромагнитный вращающий момент создается за счет сил одностороннего магнитного притяжения ротора к статору несимметричным вращающимся магнитным полем. 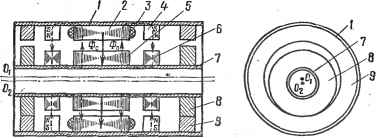 Рис. 2.66. Схема конструкции синхронного микродвигателя с катя-щимся ротором индукторного типа Конструкция реальных микродвигателей с катящимся ротором в значительной мере определяется методом получения несимметричного вращающегося поля, устройством поверхностей обкатывания и механизма передачи несоосного вращения ротора. На рис. 2.66 изображена схема конструкции микродвигателя с катящимся ротором индукторного типа [25]. В корпусе 1 закреплены сердечник статора 2, постоянные магниты 4 и направляющие статора 9. Статор не отличается по конструкции от статора классической синхронной машины и его обмотки 3 предназначены для создания симметричного вращающегося потока Ф. Постоянные магниты имеют радиальную намагниченность и создают униполярный поток. подмагничивания Фп. Иногда для этой цели используют обмотку с постоянным током. Направляющие статора имеют гладкую или зубчатую поверхность. Ротор двигателя монтируют на полой втулке 7, которая одновременно служит магнитопроводом для потока подмагничивания. Основной сердечник 5 ротора собирается из листовой электротехнической стали и не имеет обмоток. Кольцевые сердечники (тороиды) б. набранные из листовой электротехнической стали, уменьшают магнитное сопротивление на пути потока подмагничивания. Катки в ротора имеют гладкую или зубчатую поверхность. Их наружный диаметр несколько больше диаметра ротора, что предохраняет поверхности ротора и статора от непосредственного соприкосновения и износа. Внутри полой втулки размещают кинематический механизм передачи несоосного вращения ротора типа Сешерона, Альстома или Кардана. Когда катки опираются на направляющие, оси статора 0 и ротора 6*2 не совпадают, т. е. имеет место эксцентриситет. В воздушном зазоре между статором и .ротором происходит наложение униполярного потока подмагничивания на вращающийся поток Ф, распределенный вдоль, окружности по закону, близкому к синусоидальному (рис. 2.67). Результирующее вращающееся поле в зазоре Фе становится несимметричным. Электромагнитную силу притяжения, действующую на элемент поверхности ротора, определяют соотношением Максвелла 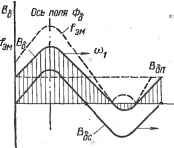 2Ж В f =- /эм > (2.73) Рис. 2 67. Распределение индукции вдоль окружности воздушного зазора для поля статора fig,. подмагннчива- где В - нормальная К поверх-ния Вьп и результирующего ности ротора составляющая век- тора магнитной индукции; - магнитная проницаемость воздушного зазора. Следовательно, результирующая сила магнитного притяжения ротора К статору направлена вдоль максимума волны индук-  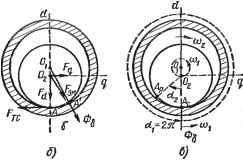 Рис. 2.68. Принцип действия синхронного микродвигателя с катя-, щимся ротором ции Вб (рис. 2.67), т. е. по оси результирующего вращающего поля Фе. Принцип действия синхронного микродвигателя с катящимся ротором можно рассмотреть на модели, изображенной на рис. 2.68. В расточке статора, имеющей диаметр £>i, эксцентрически располо- я?ен ферромагнитный ротор с наружным диаметром Dg. При качественном анализе на модели принимаем, что оси м.д. с. статора Fc, потока статора Фс и результирующего потока Фе- совпадают. Координатную ось, проходящую через центр статора Oi и точку минимального зазора, считаем продольной d, а перпендикулярную ей - поперечной q. В исходном положении (рис. 2.68, а) ось потока Фе проходит через точку А соприкосновения статора и ротора. Сила F притяжения ротора к статору направлена по оси к, составляющая по оси q равна нулю и ротор находится в положении устойчивого равновесия. При смещении потока Фе (рис. 2.68, б) относительно точки соприкосновения А появляется составляющая силы притяжения по оси q. Сила Fg создает относительно точки А, как относительно мгновенного центра вращения, электромагнитный вращающий момент M32=0,5FA. (2.74) Под действием момента ротор перекатывается по поверх- ности статора до тех пор, пока точка соприкосновения ротора и статора не переместится в Л и центр ротора 0 не окажется на оси потока Фб . Если поле совершит полный оборот ai=2n (рис. 2.68, е), то за счет разности окружностей катания статора и ротора (nD - яО. в исходную точку Ло на поверхности статора придет точка ротора, смещенная по полю относительно исходной Лр на величину этой разности. Значит, ротор повернется вокруг своего.центра против направления вращения поля на угол а,2п Вг-В .2.75) При непрерывном вращении поля с синхронной скоростью в двигателе синхронно с полем в сторону поля вращаются точка соприкосновения ротора со статором и центр ротора 0 относительно центра статора 0. Ротор, как следует из (2.75), вращается вокруг своей оси против поля со скоростью (2.76) которая является выходной скоростью двигателя. Если диаметры статора и ротора выбраны близкими по величине, то -<1 и а)2< 1, ©2 Т. е. в двигателе осуществляется значительное редуцирование скорости. У современных микродвигателей коэффициент редуцирования достигает 1500. Как указывалось, в реальном двигателе происходит обкатывание не ротора по статору, а катков ротора по направляющим статора. Поэтому выражение (2.76) принимает вид
|