
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока co,=a =i, (2.77) где D,j и - диаметры окружностей катания направляющих и катков. Для определения вращающего момента на выходном валу двигателя необходимо из (2.74) найти P,=J f/s, . (2.78) где - проекция силы /э (2.73) на ось д; us - элемент активной поверхности ротора. В общем виде для рассматриваемой конструкции двигателя формула вращающего момента может быть записана следующим образом: , Л1з2=/вФпФс51пу, (2.79) где fee - коэффициент, зависящий от конструктивных параметров и величины эксцентриситета; при отсутствии эксцентриситета ks =0; у - угол между осью потока Ф;. и продольной осью ротора d. Как видно, момент Мэг-О при отсутствии потока подмагничивания Фп (вращающееся поле симметричное) или эксцентриситета ротора и статора. У синхронных микродвигателей с катящимся ротором другой конструкции электромагнитный момент может иметь кроме активной (2.79) реактивную составляющую, изменяющуюся по закону sin 2у. Как у всех синхронных микродвигателей, при увеличении момента сопротивления М ротор продолжает вращаться с прежней скоростью, но точка соприкосновения отстает от оси поля на больший угол. Если момент М превысит максимум Mgg, то ротор выходит из синхронизма. Однако у микродвигателей с катящимся ротором, имеющих гладкие катки и направляющие, возможен еще один случай выхода из синхронизма. Соотношение скоростей (2.77) справедливо при качении без проскальзывания. Если поверхности направляющих и катков зубчатые, то проскальзывание невозможно. При гладкой поверхности проскальзывание отсутствует, если F,<F (2.80) где Р. - сила трения скольжения в точке соприкосновения (рис. 2.68, б). Значит, если момент сопротивления М достигает такой величины, что для создания вращающего момента М2=М требуется сила Рд, большая чем Рте. т. е. нарлшается условие (2.80), то начинается проскальзывание катков по направляющим и двигатель переходит в асинхронный режим: Микродвигатели с катящимся ротором имеют хорошие динамические характеристики: при частоте /=50 Гц время пуска составляет порядка 0,01 с, реверса - (0,0150,025) с, так как электромеханическая постоянная времени двигателя, пропорциональная моменту инерции вращающихся частей и их скорости, весьма мала. Объясняется это тем, что ротор вращается относительно своего центра с очень малой скоростью со.. Центр ротора вращается вокруг центра статора с большой скоростью со, но при малом эксцентриситете радиус вращения и соответственно момент инерции незначительный. При остановке двигателя выключением переменного напряжения статора происходит самоторможение ротора за счет большой силы притяжения к статору, создаваемой полем подмагничивания в точке соприкосновения. Наряду с преимуществами следует отметить некоторые недостатки микродвигателей с катящимся ротором. Конструкция двигателя вообще и механизма передачи вращения в частности довольно сложная, что связано со специфическим несоосным вращением ротора. Центробежные силы, возникающие за счет вращения центра ротора относительно центра статора, вызывают вибрации, шумы и неравномерность мгновенной скорости вращения ротора. Волновые микродвигатели Синхронные волновые микродвигатели представляют собой конструктивное объединение электрической машины и волновой зубчатой передачи. Особенность конструкции таких двигателей заключается в том, что они имеют гибкий, деформирующийся в радиальном направлении ротор, непосредственно на поверхность которого крепится гибкий зубчатый венец волновой передачи. Электромашинная часть волнового двигателя создает вращающий момент и является электромагнитным генератором механических волн деформации для волновой передачи. Конструкцию и принцип действия синхронного волнового двигателя рассмотрим на примере машины реактивного типа [25]. На рис. 2.69 изображена схема конструкции синхронного волнового реактивного двигателя с радиально-осевым замыканием магнитного потока. В корпусе / укреплены П-образные ферромагнитные сердечники 2 статора. На сердечниках расположены сосредоточенные катушки 3, образующие двух- или трехфазную обмотку переменного тока, предназначенную для создания в воздушном зшоре вращающегося магнитного поля. Жесткий зубчатый венец 8 волновой передачи закреплен на внутренней поверхности статора. Ротор 4 представляет собой гибкий тонкостенный стакан, выполненный из металла или пластмассы и укрепленный на выходном валу 9. На внешней поверхности ротора крепится гибкий зубчатый венец 7 волновой передачи. Внутренний магнитопровод состоит из отдельных ферромагнитных секторов 5, которые могут перемещаться в радиальном направлении и дефор- мировать ротор. К внутренней поверхности ротора они прижимаются центрирующими эластичными кольцами б. . При подаче переменного напряжения на обмотки статора в воздушном зазоре создается вращающееся со скоростью C0i=2n- магнитное поле Ф. Первая гармоника индукции Вес этого поля при 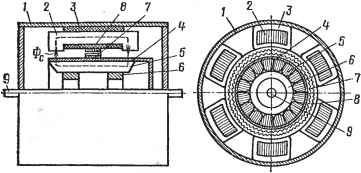 Рис. 2.69. Схема конструкции синхронного волнового микродвигателя реактиввого тапа с радиально-осевым замыканием магнитного потока числе пар полюсов обмотки р= 1 изображена на рис. 2.70, а. В поле на секторы внутреннего магнитопровода действуют силы электромагнитного притяжения к статору. Эпюра сил электромагнитного притяжения /эм, построенная с учетом (2.79), также изображена на рис. 2.70, а. Секторы смещаются в радиальном направлении, дефор- 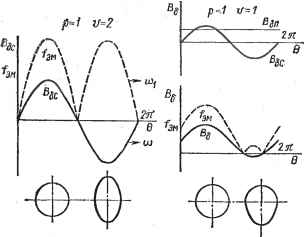 p=Z t/=2 Ч S) £) Рис. 2.70. Распределение индукции и сил притяжения вдоль окружности ротора волнового двигателя
|