
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока Шаговые микродвигатели (ШД) работают в комплекте е электронными коммутаторами. Роль коммутатора состоит в переключении обмоток управления ШД с последовательностью и частотой, соответствующими заданной команде. В общем случае шагЬвый микродвигатель совместно с коммутатором можно рассматривать как систему частотного регулирования скорости синхронного двигателя, отличающуюся дискретным питанием обмоток прямоугольными импульсами напряжения и возможностью фиксации углового положения ротора. При этом результирующий угол поворота ротора ШД строго соответствует числу переключений обмоток, управления, направление поворота - порядку переключений, а скорость вращения - частоте переключения. Шаговые микродвигатели в соответствии с общей классификацией синхронных машин можно подразделить на три основные конструктивные группы: с постоянными магнитами (активного типа), реактивные и индукторные. Шаговые микродвигатели могут иметь различное число фаз, но наибольшее распространение получили двух-, трех- и четырехфазные ШД. Фазовая обмотка статора либо целиком является обмоткой управления, либо ее расщепляют на две (выводом средней точки), магнитные оси которых сдвинуты в пространстве на 180. Напряжение питания обмотки управления шагового двигателя представляет собой последовательность однополярных или разнопо-лярных прямоугольных импульсов, поступающих от коммутатора. Микродвигатели активного типа Статор шаговых микродвигателей в отличие от синхронных микродвигателей непрерывного вращения имеет явно выраженные полюса, на которых располагают обмотки управления. Число пар полюсов каждой из обмоток управления р равно числу пар полюсов ротора. Наибольшее распространение получили ШД активного типа с магнитоэлектрическим возбуждением ротора, который выполняют в виде звездочки постоянных магнитов литой или состав-Рис 2.73 Конструкции рото- конструкции (рис. 2.73). rZLTlZLr Принцип действия такого ШД рас- смотрим на примере двухфазной двухполюсной конструкции (рис. 2.74). Будем считать, что направления м. д. с. и потоков как в статоре, так и в роторе совпадают. Кавдому управляющему импульсу, поданному на вход коммутатора, соответствует скачкообразное изменение величины или полярности напряжений, прикладываемых к обмоткам управления А и В. Создаваемый обмотками управления магнитный поток Фс перемещается по окружности статора на фиксированный угол. Возникает синхронизирующий момент, стремящийся повернуть ротор в положение макси- 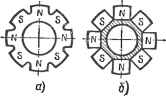 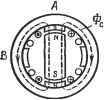 мального потокосцепления с возбужденными обмотками. Ротор делает шэг, т. е. поворачивается на фиксированный угол, величина которого равна шагу вектора потока статора (положения а, б, в на рис. 2.74). Б Б Л А А а) 6) 6) Рис. 2.74. Принцип действия шагового двигателя Показанная на рис. 2.74 раздельно-совместная последовательность включения обмоток управления относится к несимметричной системе коммутации, так как нечетным и четным тактам соответствует возбуждение различного числа обмоток и различная величина результирующего потока статора. Систему коммутации называют симметричной, если на всех тактах возбуждается одинаковое число обмоток управления (раздельно. 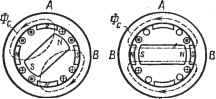 СилоВое Сигнал питание Такты 
А-В-) СилоВое Сигнал питание Такты 5) I Коммутатор hLbr-nl (АВ)-{АВ)-{ВА)-{АЕ) Рис. 2.75. Схемы коммутации шагового двигателя парами, по три и т. д.). Из рис. 2.74 видно, что при симметричной коммутации шаг увеличивается вдвое, а величина результирующего потока статора на всех тактах одинакова. В общем случае число шагов результирующего потока статора и шагов ротора в пределах 360° эл. прямо пропорционально числу обмоток управления гПу и зависит от схемы коммутации. На рис. 2.75 изображены схемы обмоток управления, временная диаграмма импулы;ов напряжения на обмотках и пространственная диаграмма положений результирующего потока статора Фс для: а) симметричной разнополярной схемы коммутации ШД с двухфазной нерасщепленной обмоткой статора (ту=2); б) симметричной однополярной схемы коммутации ШД с двухфазной расщепленной обмоткой статора (ту=4). Сравнение этих двух случаев показывает, что применение разно-полярной коммутации в двигателях с нерасщепленными фазовыми обмотками статора сказывается на величине шага равносильно расщеплению фазовых обмоток, т. е. удвоению числа обмоток управления при однополярной коммутации (табл. 2.2). Количество состояний коммутатора, обеспечивающих новое угловое положение результирующего магнитного потока статора в пределах 360° эл., назовем числом тактов k. схемы управления. Согласно изложенному число тактов схемы управления к.,=туП1П2, (2.85) где 1 - коэффициент, равный 1 при симметричной и 2 при несимметричной коммутации; ng -- коэффициент, равный 1 при однополярной и 2 при разнополярной коммутации. Применение разнополярной коммутации в двигателях с расщепленными фазовыми обмотками статора смысла не имеет. В большинстве схем управления вектор Фс занимает все ft возможных положений за один оборот (в электрических градусах). При этом величина шага ротора ШД (в электрических градусах) Yua=. (2.86) Реальные шаговые микродвигатели являются многополюсными (р>1) и механический шаг, т.е. угол поворота ротора за один такт коммутации, Ушэз (2.87) Увеличение числа пар полюсов при неизменном диаметре ротора ограничено технологическими возможностями и увеличением потоков рассеяния между полюсами, обычно Увеличение числа об- моток управления связано с усложнением коммутатора, обычно my=2-f-4. Поэтому у активных ШД величина у порядка десятка градусов. Реактивные и индукторные микродвигатели В конструкции реактивных и индукторных шаговых микродвигателей с целью уменьшения величины шага используют принцип электромагнитного редуцирования скорости, изложенный в § 2. П. Рассмотрим особенности конструкции и принцип действия трехфазного реактивного редукторного ШД (рис. 2.76). Статор и ротор набирают из листовой электротехнической стали. Поверхность ротора
|