
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока Таблица 2.2
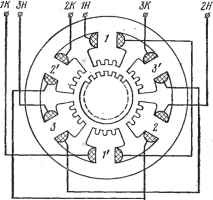 и полюсных выступов статора зубчатая. Зубцовые деления ротора и статора равны. Зубцы ротора соосны с зубцами одной диаметрально расположенной пары полюсных выступов статора и смещены на 7з зубцового деления соответственно по часовой стрелке и против относительно зубцов двух других пар полюсных выступов. При поочередном однсполярном питании обмоток управления происходит поворот магнитного потока статора на 120° и синхронизирующий реактивный момент поворачивает ротор на 7з зубцового деления в положение минимального магнитного сопротивления относительно возбужденной пары полюсов. При большом числе зубцов ротора Zp его угол поворота значительно меньше угла поворота поля статора. В общем случае указанное смещение осей зубцов ротора и статора производится :ia угол 360°/myZp. За полный цикл коммутации ротор поворачивается на одно зубцовое деление 360°/Zp и величина шага определяется по формуле (2-88) Следует иметь в виду, что в реактивном микродвигателе изменение направления поля на 180° эл. не влияет на состояние ротора и при вычислении шага в выражении (2.85) для k. необходимо брать П2=1 и при однополярной и при разнополярной коммутации. В реактивном ШД полный период изменения магнитного сопротивления и магнитного поля в воздушном зазоре соответствует повороту ротора относительно статора на одно зубцовое деление. Это значит, что зубец и паз ротора эквивалентны паре полюсов и занимают 360° эл., т. е. Zp=p и шаг в электрических градусах можно определять по (2.86). Сравнение выражений (2.87) и (2.88) показывает, что при одинаковом числе полюсных выступов на роторе величина шага реактивного ШД в два раза меньше, чем активного. Кроме того, при одинаковом диаметре ротора в соответствии с технологическими особенностями у реактивного ШД можно выполнить значительно больше зубцов, чем полюсов постоянных магнитов у ШД активного типа. Поэтому у реактивных ШД величина шага достигает нескольких градусов или долей градуса. Индукторные ШД отличаются от рассмотренных реактивных тем, что у них применяется подмагничивание ротора постоянным магнит-ым потоком со стороны статора, как у синхронных редукторных микродвигателей индукторного типа. При этом несколько увеличи- Рис. 2.76. Схема конструкции реактивного редукторного ШД вается синхронизирующий момент, улучшаются энергетические и динамические характеристики. Кроме рассмотренных основных конструкций шаговых микродвигателей, в целях уменьшения величины шага и повышения динамических показателей в качестве шаговых начинают использовать синхронные волновые ШД, ШД с катящимся ротором, с дисковым ротором и печатной обмоткой. Имеются линейные ШД, преобразующие импульсную команду непосредственно в линейное перемещение. Режимы работы и характеристики шаговых микродвигателей Работу ШД считают устойчивой, если он работает без потерь шага, т. е. ротор зани.мает устойчивое положение, соответствующее положению вектора результирующей м. д. с. статора, при каждом шаге вектора м. д. с. Режимы работы ШД различают в основном в зависимости от частоты управляющих импульсов /. 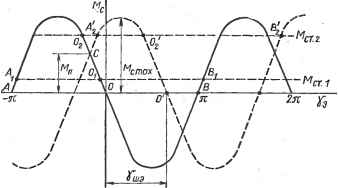 Рис. 2.77. Угловые характеристики ШД с симметричными зубцами Статический режим (/=0) соответствует протеканию постоянного тока по обмоткам управления, создающим неподвижное магнитное поле. Основной характеристикой этого режима является зависимость статического синхронизирующего момента от угла рассогласования Уэ (в электрических градусах) между продольной осью ротора и м.д. с. статора (рис. 2.77, сплошная линия). Продольная ось ротора совпадает с направлением потока ротора в ШД активного типа и с направлением наименьшего магнитного сопротивления в реактивных и индукторных ШД. Как известно из теории
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||