
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока синхронны}с микродвигателей (§2.9), зависимость Мс~т(Уа) периодическая. Основная гармоника синхронизирующего момента Мс = Мс max sin Уэ=Мс шах sin (613 - Вэ), (2-89) где листах - максимальный синхронизирующий момент; вэ, 62,- углы поворота м. д. с. статора и оси ротора в электрических градусах. Зоной статической устойчивости уу является окрестность точки устойчивого равновесия на угловой характеристике, из любой точки которой после снятия возмущающего воздействия ротор возвращается в исходную точку устойчивого равновесия. При статическом моменте сопротивления Мег=О точка устойчивого равновесия - О, точки неустойчивого равновесия - А и В, т. е. зона статической устойчивости АОВ симметрична Усу=(-л)н-(+я). В случае наличия момента нагрузки Мг Ф О зона статической устойчивости становится несимметричной, например А-)ф при М ,>0. Предельный момент сопротивления М. при котором возможен пуск ШД, Т. е. отработка шага в заданном направлении, определяется точкой пересечения С исходной угловой характеристики с характеристикой, сдвинутой на шаг (пунктирная линия на рис. 2.77): K = Me ,axCOsf (fe,>2). (2.90) Если М =Л1сг2 > то ротор (точка 0 при шаге поля статора окажется вне новой зоны статической устойчивости АОВ и пуска не произойдет. Условие отработки шага из состояния покоя имеет вид YycT>YHeycT + Ym3. (2.91) где ууст и Унеуст - координаты точек устойчивого и неустойчивого равновесия исходной угловой характеристики. Как видно из (2.90), при k.=2 момент Мп=0. Следовательно, минимально необходимое (при Мст,=0) по условию пуска число тактов коммутации. т.>2, т. е. ШД активного типа, у которого возможна разнополярная коммутация, должен иметь не менее двух обмоток управления, а реактивные и индукторные ШД - не менее трех. Это следует из принципа действия ШД как синхронной машины, у которой при Уэ=180° и 360° момент Ме=0. Возможно в1Лполнение однофазных шаговых двигателей с =2. При этом у реактивного ШД статор и ротор выполняют с несимметричными зубцами (рис. 2.78, а). Угловая- характеристика такого шагового микродвигателя имеет полуволны, различны по форме (рис. 2.78, б), что обусловлено законом изменения магнитного сопротивления вдоль окружности воздушного зазора двигателя. Как видно, теперь М =0 при Ушэ=±л. Статическая ошибка ШД, т. е. разность углов поворота ротора и м. д. с. статора в статическом режиме (координата точки 0 на рис. 2.77), зависит от величины и знака статического момента сопротивления и крутизны начального участка угловой характеристики, т. е. удельного момента. Режим отработки единичных шагов соответствует частоте управляющих импульсов, при которой переходный процесс, чаще всего 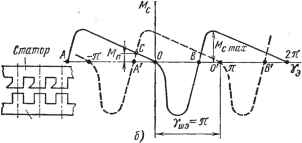 Ротор Рис. 2.78. Угловые характеристики реактивного ШД с несимметричными зубцами колебательный, на каждом шаге заканчивается к началу следующего шага, т. е. угловая скорость ротора eg в начале каждого шага равна нулю (рис. 2.79). В момент времени ty ротор переместился на величину шага, однако он имеет максимальные скорость %гг1ак и кинетическую энергию и продолжает перемещаться против сил поля. Начинается процесс свободных колебаний [(качаний) ротора относительно положения устойчивого равновесия, как у всех синхронных микродвигателей (см. § 2.10). Колебания затухают, когда вся кинетическая энергия будет израсходована на электрические, магнитные и механические потери, вызванные этим процессом. Амплитуда и время затухания колебаний тем меньше, чем больше эти потери. Основными показателями режима отработки единичных шагов являются: а) величина перерегулирования максимальное отклонение от нового положения устойчивого равновесия ротора при переходном процессе; б) максимальное значение мгновенной, скорости ротора Qmax. в процессе механического шага; 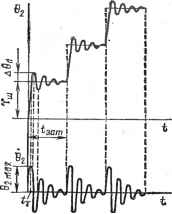 Ае , т. е. Рис, 2.79. Процесс отработки шага ШД в) время затухания свободных колебаний ротора на одном шаге зат- У шаговых двигателей желательно уменьшать ДЭп и 4ат при сохранении необходимой мгновенной скорости ротора eg. Среднюю скорость вращения ротора ШД определяют по формуле щ, рад/с=:/у. (2.92) Установившийся режим работы шаговых двигателей соответствует постоянной частоте управляющих импульсов, причем за больше времени одного такта коммутации. В установившемся режиме вращение ротора с некоторой средней скоростью 0)2 сопровождается вынужденными колебаниями относительно мгновенной точки устойчивого равновесия. Амплитуда колебаний достигает наибольшей величины при частоте управляющих импульсов, совпадающей с резонансной - собственной частотой ротора. В области частот, где скорость электромагнитных переходных процессов значительно выше, чем механических, движение ротора ненагруженного ШД математически можно описать уравнением равновесия моментов Л4с=-Мд +Мде.,±М (2.93) где Мдин - динамический момент; Мдем - демпфирующий электромагнитный момент; - момент трения. Величина динамического момента определяется моментом инерции ротора и ускорением: Mд =J?a=i-.. (2.94) dt р dt Внутреннее электромагнитное демпфирование колебаний ротора обеспечивается за счет наведения э. д. с. вращения в обмотках управления. В ШД активного типа э. д. с. вращения наводится потоком возбуждения ротора, в индукторных и реактивных ШД -переменной .составляющей потока возбуждения, возникающей в результате изменения магнитного сопротивления при вращении ротора. Э. д. с. вращения вызывает в цепи обмоток управления дополнительные токи, которые во взаимодействии с вызвавшим их потоком создают демпфирующий момент, препятствующий изменению скорости рото5а. Величина демпфирующего момента пропорциональна скорости вращения ротора: Мд, =С. . (2.95) где D - коэффициент демпфирования. Коэффициент демпфирования зависит в основном от переменной составляющей потокосцепления ротора с обмоткой управления статора и при прочих равных условиях наибольший у ШД активного типа. Если пренебречь моментом трения М. и рассматривать работу ШД при малых углах рассогласования осей ротора и м. д. с. статора
|