
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока (sinY Y). то, подставив (2.89), (2.94) и (2.95) в (2.93), получаем, дифференциальное уравнение движения ротора аЮ-гэ . Dp dB , УИс шахР д Мс упахР q (2.96) В выражении (2.96) коэффициент при вэ есть квадрат угловой частоты собственных колебаний ротора (в электрических радианах) >03=/ Мс тахР (2.97) Частоту управляющих импульсов /д, соответствующую главному резонансу, определяют по (2.92) при оаэ/Р- Частичные резонанс-вые явления возможны при частотах управляющих импульсов, в целое число раз меньших /д. f Коэффициент при ваэ в (2.96) характеризует относительный коэффициент затухания колебаний К: (2.98) 2Я=-  Рис. 2.80. Предельная механическая характеристика и характеристика приемистости ШД Важной характеристикой установившегося режима является предельная механическая характеристика - зависимость частоты управляющих импульсов от величины статического момента сопротивления, при котором ротор выходит из синхронизма (сплошная линия на рис. 2.80). Иными словами, она определяет тот предел, до которого при данной частоте управляющих импульсов можно плавно нагружать вал ШД, оставляя синхронный режим. Предельную механическую характеристику рассматривают обычно при />/о. С увеличением частоты происходит уменьшение вращающего момента ШД, что объясняется в основном двумя факторами. Во-первых, в результате действия демпфирующего момента от э. д. с. вращения. Во-вторых, э. д. с. самоиндукции в обмотках управления становится соизмеримой с напряжением источника питания и ток в обмотках управления за время такта не успевает нарастать до установившегося значения, что снижает величину результирующего потока статора. Снижение синхронизирующего момента тем резче, чем больше электромагнитная постоянная времени обмоток управления. Динамическая ошибка ШД, т. е. мгновенное значение угла рассогласования движущихся осей ротора и м. д. с. статора, может превышать статическую ошибку ввиду дискретного перемещения м. д. с. статора и колебательного характера движения ротора. Переходные режимы -пуск, торможение, реверс, переход с одной частоты на другую - сопровождаются переходными процессами в ШД, вызванными изменением частоты управляющих импульсов и скорости вращения ротора. Важным показателем пускового режима является частота приемистости - максимальная частота управляющих импульсов, при которой ротор еще входит в синхронизм с места без потери шагов. Скачкообразное увеличение частоты управляющих импульсов при пуске от нуля до рабочей приводит к тому, что вначале ротор отстает от м. д. с. статора под действием момента инерции вращающихся частей. По мере ускорения он достигает скорости м. д. с. статора и за счет запасенной кинетической энергии может опередить м. д. с. Постепенно колебания ротора затухают и двигатель переходит в установившийся режим. Таким образом, в процессе пуска ротор может отставать от м. д. с. статора на шаг и более и потерять эти шаги (выйти из синхронизма). Частота приемистости растет с увеличением синхронизирующего момента, а также с уменьшением величины шага, момента инерции вращающихся частей и статического момента сопротивления (штрих-пунктирная линия на рис. 2.80). При торможении и реверсе ШД также имеются предельные значения перепада частот, при которых обеспечивается переходный процесс без сбоя шага. Предельная частота торможения при установившемся режиме вращения равна частоте приемистости. Предельная частота торможения при переходном режиме и предельная частота реверса на 30-ь40% ниже частоты приемистости. § 2.13. ВСПОМОГАТЕЛЬНЫЕ ОДНОФАЗНЫЕ МИКРОДВИГАТЕЛИ ПЕРЕМЕННОГО ТОКА Для маломощных нерегулируемых электроприводов в качестве вспомогательных используют микродвигатели с расщепленными экранированными полюсами и асинхронные микродвигатели с пусковыми эле. ентами, работающие от однофазной сети переменного тока и называемые поэтому однофазными Микродвигатели с расщепленными экранированными полюсами Наиболее простыми однофазными двигателями переменного тока являются микродвигатели с расщепленными экранированными полюсами (рис. 2.81, а) в асинхронном и синхронном исполнении. Статор 1 такого двигателя внополюсный и состоит из двух пакетов электротехнической стали. На статоре имеется однофазная обмотка возбуждения 2. На каждом из полюсов 3 находится продольный паз, в котором размещается одна из сторон короткозамкнутых витков 4, охватывающих и экранирующих часть (от Ve ДО V2 полюсной дуги) полюса. В расточке полюсов помещается ротор, 5 двигателя. Конструкция ротора зависит от типа микродвигателя, В двигателях асинхронного исполнения ротор типа беличьей клетки , полый немагнитный или ферромагнитный. При синхронном варианте ротор может быть с постоянным магнитом (активный), из магнитнотвердого материала (гистерезисный) или с переменным вдоль окружности магнитньм сопротивлением (реактивный). При чтодаче однофазнрго переменного напряжения на зажимы обмотки возбуждения в магнитопроводе статора создается пульсирующий магнитный поток Ф. Проходя по полюсам статора, этот поток расщепляется продольным пазом на два потока Ф и Ф , сдвинутых в пространстве на угол у. Поток Ф, замыкаясь по экранированной части полюсов, наводит в короткозамкнутых витках трансформаторную э. д. с. По виткам течет ток, отстающий от э. д. с. вследствие индуктивного характера сопротивления витков. Под действием м. д. с. витков создается поток Ф, замыкающийся по экранированной части полюсов. В сумме с потоком Ф он образует результирующий магнит- 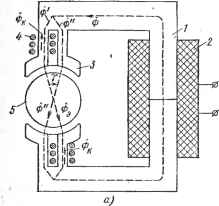 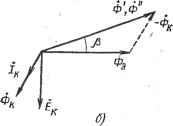 Рис. 2.81. Схема конструкции (а) и векторная диаграмма (б) однофазного микродвигателя с расщепленными экранированными полюсами ный поток Фэ экранированной части полюсов, сдвинутый во времени относительно потока неэкранированной части полюсов Ф : Фэ=ФЧ-Фк. (2.99) Векторная диаграмма микродвигателя изображена на рис. 2.81, б. Магнитные потоки Ф и Фд, сдвинутые относительно друг друга в пространстве и во времени, создают результирующее вращающееся магнитное поле. Так как углы сдвига магнитных потоков Ф и Фэ. во времени и пространстве обычно меньше 90°, а величины потоков не равны, магнитное поле будет не круговым, а эллиптическим. Вращающееся магнитное поле взаимодействует с ротором двигателя и создает вращающий момент, природа которого зависит от типа ротора. Существенное преимущество однофазных микродвигателей с расщепленными полюсами, кроме простоты конструкции и небольшой стоимости - это их надежная работа при частых пусках и остановках под напряжением. Это объясняется тем, что основными потерями в двигателе являются электрические потери в короткозамкнутых витках. Следовательно, величина полных потерь в двигателе практически не меняется от режима холостого хода до короткого замыкания (остановки
|