
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока в том, что сердечник магнитного усилителя является частью магнитопровода двигателя. На рис. 2.88 приведена схема конструкции двухфазного реверсивного (с двумя магнитными усилителями) микродвигателя-усилителя с ротором типа беличьей клетки . Сердечник статора 1 разделен по длине на четыре пакета. Каждый из пакетов является кольцевым сердечником магнитного усилителя. Рабочие обмотки усилителя 2 наматывают на каждый пакет, а обмотки смеихения и управления 3 охватывают по два пакета. Обмо)-ка статора двигателя 4 распределенная, двухфазна. Ее укладывают в пазы после намотки через эти же пазы обмоток магнитного усилителя. Конструкция ротора 5 обычная для асинхронной машины. Обмотки магнитного усилителя расположены и соединены так, что создаваемый поток Фм замыкается по сердечнику статора, не проникая через воздушный зазор в ротор (рис. 2.89). В сердечнике статора происходит наложение магнитного потока двига- 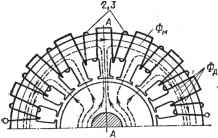 Рис. 2.89. Распределение магнитных токов в двигателе-усилителе 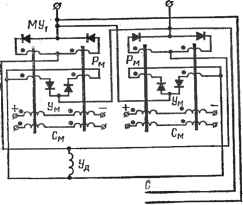 тел я теля. Фд на поток усили- 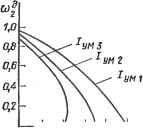 Рис. 2.90. Реверсивная амплитудно-фазовая схема управления микродвигателем-усилителем о,г 0,4 о,в ofi 1,0 Рис. 2.91. Механические характеристики микродвигателя-усилителя Если сердечник статора не насыщен, то распределение потока двигателя в обе стороны относительно оси А А равномерное, размагничивающее действие потока усилителя в одной половине сердечника равно намагничивающему действию в другой половине и магнитные системы двигателя и усилителя можно считать независимыми. Это свидетельствует о том, что двигатель-усилитель имеет практически такие же характеристики, как соответствующий двигатель с внешним магнитным усилителем. Некоторое искажение характеристик наступает в случае насыщения сердечника статора. При этом намагничивающее и размагничивающее действие потока Ф на поток Фд становится неэквивалентным и появляется индуктивная связь обмоток двигателя и усилителя. Управление скоростью вращения ротора микродвигателя-усилителя соответствует амплитудному и амплитудно-фазовому способам управления исполнительными асинхронными микродвигателями (§ 2.7). На рис. 2.90 представлена реверсивная- амплитудно-фазовая схема управления микродвигателем-усилителем. При отсутствии сигнала на обмотках управления усилителей У ток в обмотке управления двигателя Уд практически равен нулю и ротор неподвижен. Увеличение тока в обмотке управления первого усилителя МУ, приводит к уменьшению магнитной проницаемости сердечника и тем самым к уменьшению индуктивности и индуктивного сопротивления рабочих обмоток усилителя Р , включенных последовательно с обмоткой управления двигателя Уд. Возрастает амплитуда напряжения и тока в обмотке Уд, меняется эллиптичность поля статора, увеличивается скорость вращения ротора. При поступлении управляющего сигнала на обмотку управления второго .усилителя МУ2 ток по обмотке управления двигателя протекает в противоположном направлении и осуществляется реверсирование двигателя. Механические характеристики i микродвигателя-усилителя при различной величине тока в обмотке управления /у усилителя показаны на рис. 2.91. Они несколько отличаются от характеристик амплитудного и амплитудно-фазового управления, представленных на рис. 2.35, не учитывающих влияния выходного сопротивления источника сигнала (/y s</yM2<yMl)- Как видно из рис. 2.91, при уменьшении тока управления усилителя весьма существенно уменьшается критическое скольжение двигателя (растет щр) и у механической характеристики может появиться неустойчивый участок (кривая /умз). Объясняется это в основном тем, что в схеме управления с магнитным усилителем индуктивное сопротивление рабочей обмотки магнитного усилителя Ху оказывается включенным последовательно с индуктивным сопротивлением Хс статора двигателя. Тогда критическое скольжение двигателя определяется соотношением [Н s --г-, (2-105) Ху+Хс+Хр где Rp и Хр - приведенные активное и индуктивное сопротивления ротора. Как уже отмечалось, при уменьшении тока управления усилителя /уи величина Ху возрастает и, следовательно, снижается критическое скольжение s. Синхронные микродвигатели-трансформаторы 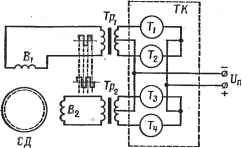 Рис. 2.92. скорости Схема частотного регулирования синхронного микродвигателя-(грансформатора Синхронный микродвигатель-трансформатор конструктивно представляет собой двухфазный синхронный двигатель, объединенный с трансформатором. Схема статора синхронного микродвигателя-трансформатора в основном подобна схеме статора асинхронного микродвигателя-усилителя (рис. 2.88). Огличие только в том, что на сердечник статора дополнительно наматывают не обмотки усилителей, а первичные и вторичные обмотки двух однофазных трансформаторов. Взаимное расположение обмоток трансформатора и двигателя обеспечивает отсутствие результирующей индуктивной связи при ненасыщенном магнитопро-воде. Конструкция ротора зависит от типа синхронного двигателя: активного, реактивного или гистерезисного. Такие синхронные микродвигатели - трансформаторы используют в основном в схемах частотного регулирования скорости синхронного микропривода. При этом трансформатор входит в состав статического преобразователя частоты, питающегося от автономного источника постоянного тока (аккумуляторов, солнечной батареи и т. д.). На рис. 2.92 изображена схема частотного регулирования скорости синхронного микродвигателя-трансформатора. Полупроводниковый коммутатор ТК собран на транзисторах -Т, работающих в ключевом режиме. При поочередном замыкании и размыкании цепей транзисторами Т, постоянное напряжение источника U прикладывается к различным половинам первичной обмотки трансформатора Tpi. На выходе трансформатора появляется знакопеременное напряжение, первая гармоника которого является рабочим напряжением синхронного двигателя С Д. Моменты коммутации транзисторов Тз, сдвинуты на половину такта коммутации относительно Т, Т. Напряжение; поступающее от трансфбрматора Тр. на обмотку двигателя В, оказывается сдаинутым по фазе на 90 относительно напряжения обмотки Bi. Этим обеспечивается одно из условий создания кругового вращающегося поля статора. Изменение частоты коммутации транзисторов приводит к изменению частоты и скорости вращения магнитного поля статора и, следовательно, скорости вращения ротора двигателя. Рабочие характеристики синхронного микродвигателя-трансформатора практически такие же, как у синхронного микродвигателя
|