
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока СД связаны через понижающий редуктор Р, позволяющий снизить величину шага. Сельсины СД и СП соединены по трансформаторной схеме, в которой выходное напряжение сельсина-приемника является . функцией угла поворота сельсина-датчика (см. § 4.4). Исполнительный двигатель через редуктор перемещает объект управления ОУ со скоростью, задаваемой программой. Схема работает следующим образом. Программа считьюается с магнитной ленты, информация поступает в ТК, который соответствующим образом переключает обмотки управления ШД. Ротор ШД делает заданное чисдо шагов и разворачивает ротор СД. Выходное напряжение СП, пропорциональное углу поворота ШД, поступает через усилитель на обмотку якоря ПД. Якорь исполнительного двигателя начинает вращаться и перемещать объект управления со скоростью, пропорциональной поданному напряжению, а следовательно, по заданной программе.  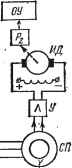 Рис. 2.95. Схема преобразователя импульсного кода в модулированный сигнал с помощью ШД Полуавтоматическая установка с программным управлением для подгонки сопротивлений микромодулей Схема полуавтомата с ШД, производящего подгонку сопротивлений .методом выжигания токопроводящей углеродной пасты ла- бУШД WA ZZ. Г IT Рис. 2.96. Структурная схема полуавтомата с ШП. для подгонки сопротивлений верным лучом, показана на рис. 2.96. Микромодули располагают? на координатном столе КС, который перемещается по координатам X чУ Z помощью двух шаговых двигателей. Система программного управления состоит из следующих основных блоков: блок задания программы - наборное поле НП; анализирующее устройство АУ; устройство управления УУ; блок управления шаговыми двигателями БУШД (транзисторный коммутатор); датчики положения ДП; устройство управления лазером УУЛ; лазер Л; преобразователь информации ПИ. На наборном поле НП задается программа работы шаговых двигателей по согласованию положений координатного стола с осью лазера Л. Информация поступает через АУ и УУ в блок управления шаговыми двигателями. БУШД в соответствии с заданной программой переключает обмотки управления ШД, которые начинают работать и перемещать через понижающий редуктор координатный стол КС. Одновременно разворачиваются датчики положения координатного стола ДП, и сигнал от них поступает через преобразователь информации ПИ в анализирующее устройство. АУ сравнивает текущие координаты КС с заданными программой и соответствующим образом корректирует работу ШД. Перемещение КС прекращается при выходе в заданную программой точку. В этот момент устройство управления УУ подает команду на блок управления лазером УУЛ, который включает лазер Л. Начинается прожиг углеродной пасты микромодуля. ГЛАВА ТРЕТЬЯ ТАХОГЕНЕРАТОРЫ § 3.1. ОБЩИЕ СВЕДЕНИЯ И КЛАССИФИКАЦИЯ Тахогенераторами называют электрические микромашины, работающие в генераторном режиме и служащие для преобразования скорости вращения в пропорциональный электрический сигнал. При этом закон преобразования определяется выходной характеристикой тахогенератора, т. е. вависимостью между входной величиной - скоростью вращения вала to и выходной - напряжением Ui в выходной обмотке. Уравнение выходной характеристики идеального тахогенератора в общем случае f/Bbix = ftyctt) = ftj,c-, (3.1) где в - угол поворота ротора тахогенератора; кув - статический коэффициент усиления (крутизна выходнЬй характеристики). Уравнение (3.1) показывает, что тахогенератор можно использовать для электромеханического дифференцирования, если функцию вадавать в виде угла поворота ротора. Конструкция тахогенераторов практически не отличается от конструкции соответствующих типов электрических микродвигателей. По конструкции и принципу действия тахогенераторы можно подразделить на три основные группы: постоянного тока, асинхронные и синхронные переменного тока. Основные требования, предъявляемые к тахогенераторам, состоят в следующем: 1) минимальная амплитудная погрешность, под которой понимают отклонение выходной характеристики от линейной зависимости; 2) минимальная фазовая погрешность, под которой понимают изменение фазы выходного напряжения при изменении режима работы; 3) максимальный коэффициент усиления; 4) малый момент инерции ротора; 5) малая электромагнитная постоянная времени. Требования, предъявляемые к тахогенераторам в зависимости от условий применения, изложены в § 3.2. Величина амплитудной погрешности AU определяется как разность между выходным напряжением, соответствующим данной скорости вращения при идеальной выходной х-арактеристике, и действительным выходным напряжением.
|