
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока Величина фазовой погрешности Др определяется как разнорть между углом р сдвига векторов напряжения возбуждения и выходного напряжения идеального тахогенератора, у которого р не зависит от скорости вращения, и действительным углом. § 3.2. ТАХОГЕНЕРАТОРЫ ПОСТОЯННОГО ТОКА Тахогенераторы постоянного тока по принципу действия и конструктивному оформлению представляют собой электрические коллекторные машины постоянного тока с независимым электромагнитным (рис. 3.1, а) или магнитоэлектрическим возбуждением. Выходной характеристикой тахогенератора постоянного тока является зависимость величины напряжения на зажимах якоря U 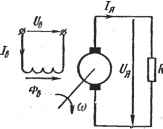 нагр 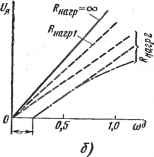 Рис. 3.1. Схема, и выходные характеристики тахогенератора постоянного тока от скорости вращения якоря со при постоянном магнитном потоке возбуждения Ф и постоянном сопротивлении нагрузки 7?нагр. Из теории электрических машин известно, что величина э. д. с. якоря прямо пропорциональна магнитному потоку возбуждения и скорости вращения якоря. Значит, при постоянном магнитном потоке можно записать: (3.2) где 0 - угол поворота якоря тахогенератора; кв-постоянная машины, равная ЙФ; k - конструктивный коэффициент по (2.3). Выражение (3.2) - это уравнение выходной характеристики тахогенератора постоянного тока при холостом ходе, т. е. при разомкнутой цепи якоря. Данная линейная зависимость показана на рис. 3.1, б (для /?нагр=оо). Значения скорости са взяты в относительных единицах по аналогии с § 2.3. При подключении обмотки якоря к зажимам прибора или устройства с конечной величиной входного сопротивления и при постоянстве магнитного потока возбуждения выходное напряжение будет меньше э. д. с. якоря на величину падения напряжения в цепи якоря: U E -IR. (3.3) где /я - ток якоря; /?ц.я - сопротивление цепи якоря, равное сумме сопротивлений обмотки и переходного щеточного контакта. Поскольку величину тока определяют по закону Ома с помощью соотношения I-UJRnarv, (3.4) -1- нагр вагр . Уравнение (3.5) свидетельствует о линейности выходной характеристики тахогенератора постоянного тока в случае постоянства магнитного потока возбуждения и сопротивления переходного щеточного контакта. На рис. 3;1, б представлены выходные характеристики, соответствующие уравнению (3.5) для двух конечных значений сопротивления нагрузки Rasrpl и R arp2; ПрИЧСМ /?нагр 1 >/?нагр Й- Однако выходная характеристика реального тахогенератора мо.-жет отклоняться от линейной зависимости (3.5), т. е. появляется амплитудная скоростная погрешность. Это объясняется двумя факторами. Во-первых, при нагрузке тахогенератора возникает реакция якоря, ослабляющая поток возбуждения. Результирующий поток при нагрузке можно представить как Фнагр = Ф-ДФр. (3.6) где ДФр - изменение потока, вызванное .размагничивающим действием реакции якоря и пропорциональное току якоря; Ф -поток при холостом ходе. Следовательно, э. д. с. якоря при нагрузке £я.нагр не является постоянной величиной для данной скорости вращения якоря, а зависит от величины нагрузки и определяется выражением: Ся.нагр = АсоФнагр. (3.7) Во-вторых, при работе тахогенератора на нагрузку постоянным следует считать не сопротивление переходного контакта, а падение напряжения t/щ в нем. Это соответствует характеру зависимости сопротивления графита, из которого выполняют щеточные контакты, от плотности тока в нем. Тогда, очевидно, напряжение на зажимах якоря тахогенератора при нагрузке будет определяться уравнением {/я = £ .нагр-СУ(3.8) преобразуем это выражение с учетом (3.4), (3.6) и (3.7): (3-9) нагр где йр=АФр я - коэффициент пропорциональности между током якоря и потоком АФр. Выражение (3.9) является уравнением выходной характеристики тахогенератора постоянного тока с учетом размагничивающего действия реакции якоря и постоянства падения напряжения в щеточном контакте. Анализ выражения (3.9) показывает, что: 1) выходная характеристика является нелинейной (в знаменателе стоит to); 2) выходная характеристика начинается не из нуля, так как при малой скорости вращения якоря э. д. с. меньше падения напряжения в контакте коллектор - щетки (*£ >< t/щ). Это значит, что тахо-генератор имеет зону нечувствительности Ао)з. , т. е. диапазон скоростей, в пределах которого выходное напряжение равно нулю. Выходная характеристика, построенная по уравнению (3.9) для сопротивления нагрузки /?нагр2, показана на рис. 3.1, б (штрих-пунктирной линией). Если принять за идеальную f/я.в линейную выходную характеристику (3.5), то выражение относительной амплитудной погрешности, вызванной реакцией якоря, можно представить как разность (3.5) и (3.9) при (/щ=0, отнесенную к Ub.b- ---. (3.10) Погрешность, определенная по (3.10), называется расчетной. Для повьшдения линейности выходной характеристики целесообразно нагружать тахогенератор на возможно большее внешнее сопротивление R arv и использовать небольшой диапазон скоростей вращения ((й<0,5), так как в этом случае реакция якоря незначительна. Весьма высокая линейность характеристик у тахогенераторов, выполненных на базе машины постоянного тока с полым или дисковым якорем, потому что у таких машин, как указывалось, снижается влияние реакции якоря (меньше р). Значительное уменьшение зоны нечувствительности в тахогене-раторах постоянного тока получают, применяя металлические щетки с серебряными напайками в местах прикосновения к коллектору, у которых вольт-амперная характеристика линейная. Зона нечувствительности сужается с увеличением коэффициента усиления; A 3.Hffl/V (3-11) Статический коэффициент усиления тахогенератора, характеризующий соотношение между выходным напряжением на зажимах
|