
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока обмотки якоря и скоростью вращения якоря, можно определить из выражения (3.9): ( иагр) All \ Q 1 Р Л , R.+kkp<o у 2> \ нагр / Из формулы (3.12) видно, что в общем случае ky является нелинейной функцией скорости вращения якоря. Если размагничивающим действием реакции якоря в конкретном. случае можно пренебречь, т. е. принять kp=0, то выражение (3.12) преобразуется -следующим образом: feyc- (3.13) 1+ нагр При ЭТОМ допущении коэффициент кус не зависит от скорости вращения якоря. Он определяется конструктивными параметрами, пропорционален напряжению возбуждения машины (через коэффициент к) и увеличивается с ростом сопротивления нагрузки Rmcv-У тахогенераторов постоянного тока при RaarpRa коэффициент ftyc=3100 мВ/об/мин. У тахогенераторов постоянного тока с электромагнитным воз- буждением возможна температурная погрешность вследствие нагрева обмотки полюсов, повышения ее сопротивления и уменьшения тока возбуждения, что в конечном счете приводит к уменьшению потока возбуждения и выходного напряжения. Такая же погрешность возможна при колебаниях напряжения в сети, питающей обмотку возбуждения. Для того чтобы поток возбуждения из-за указанных причин не изменялся, магнитную систему тахогенератора выполняют с большим насыщением, т. е. рабочую точку на кривой намагничивания выбирают выше колена, где, как известно, даже значительные изменения тока возбуждения не вызывают больших изменений магнитного потока. Однако насыщение магнитной системы может оказаться и недостатком тахогенератора, если статический коэффициент усиления кус тахогенератора необходимо изменить путем регулирования величины магнитного потока за счет тока возбуждения. В этом случае магнитопровод тахогенератора выполняют ненасыщенным, а для предотвращения температурной погрешности применяют теплочув-ствительные магнитные шунты МШ (рис. 3.2), магнитное сопротивление которых увеличивается при росте температуры. При нагревании сопротивление обмотки возбуждения увеличивается и поток Ф уменьшается, но при этом растет и магнитное сопротивление потоку рассеяния Фа через шунты. Поток рассеяния начинает все более замыкаться через якорь и э. д. с. якоря восстанавливается до исходной величины. Тахогенератор с возбуждением от постоянных магнитов не имеет погрешностей, которые возникают в результате колебаний магнит- ного потока от указанных причин. Однако он не допускает и регулирования статического коэффициента усиления. Существенное преимущество такого тахогенератора состоит в том, что он не нуждается в источнике питания. При правильном выборе материала для постоянных магнитов можно свести до минимума погрешности из-за изменения магнитных свойств с течением времени. Тахогенераторам постоянного тока присущ еще один вид погрешности- асимметрия выходного напряжения. Она заключается в том, что при вращении якоря тахогенератора, замкнутого на 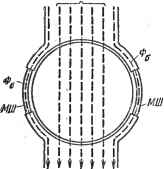 1 V Геометрическая tei нейтраль Рис. 3.2. Схема магнитной системы тахогенератора с тепло-чувствительными магнитными шунтами Рис. 3.3. Явление асимметрии выходного напряжения тахогенератора постоянного тока нагрузку, с одинаковой скоростью в противоположных направлениях; величина выходного напряжения оказывается разной. Наличие асимметрии является в основном результатом технологической неточности установки щеток на геометрической нейтрали. Рассмотрим это явление на примере схемы, изображенной на рис. 3.3. При вращении якоря по часовой стрелке со скоростью оз по якорю течет ток Уд., и возникает поток реакции якоря Фя.ч, продольная составляющая которого складывается с потоком возбуждения Ф, увеличивая результирующий поток. При вращении якоря против часовой стрелки со скоростью й>п = (й направление э. д. с. и тока в якоре меняется на противоположное. Возникает поток реакции якоря Фя.п, продольная составляющая которого направлена навстречу потоку возбуждения Ф, уменьшая результирующий поток. Вследствие неравенства результирующих магнитных потоков при противоположных направлениях вращения якоря и появляется асимметрия выходного напряжения. Величина асимметрии А определяется из выражения и. 100%. (3.14) 0.5(Уя.,-ЬУ8. ) Определенную погрешность в работу тахогенератора постоянного тока вносят пульсации выходного напряжения, которое не является постоянным во времени. Можно выделить три основных вида пульсаций: якорные, зубцовые и коллекторные. Якорные пульсации вызываются изменением магнитного сопротивления и, как следствие, магнитного потока в пределах одного оборота якоря, которое может быть обусловлено эллиптичностью или эксцентриситетом якоря, магнитной анизотропией его материала. Частота якорных пульсаций в двухполюсной машине /я=( /л- (3.15) Амплитуду якорных пульсаций можно снизить путем относительного увеличения воздушного зазора, веерной сборки сердечника якоря и повышения точности его обработки. - Зубцовые пульсации связаны с изменением величины и характера распределения магнитного потока под полеосом вследствие зубчатости поверхности якоря. Частота зубцовых пульсаций /з=, . (3.16) где Z - число зубцов на поверхности якоря. Амплитуда зубцовых пульсаций снижается при скосе пазов якоря относительно образующей цилиндра, правильном выборе ширины полюсных наконечников и применении ферромагнитных клиньев для крепления обмотки в пазах. Якорные и зубцовые пульсации отсутствуют, если в качестве тахогенератора используется машина с полым немагнитным или дисковым якорем (§ 2.2). Коллекторные пульсации вызываются в основном периодическим изменением числа секций в параллельных ветвях обмотки якоря вследствие замыкания части секций при коммутации и вибрацией щеток на коллекторе. Частота коллекторных пульсаций Л<=. (3.17) где К - число коллекторных пластин. Амплитуда коллекторных пульсаций уменьшается с увеличением числа секций и коллекторных пластин, а также с повышением качества обработки поверхности коллектора и притирки щеток. Зубцовые и коллекторные пульсации выходного напряжения являются высокочастотными и весьма легко сглаживаются LC-фильт-рами. Якорные пульсации имеют более низкую частоту. Они особенно отрицательно сказываются при работе тахогенератора в системе автоматического регулирования в зоне малых скоростей (подход системы к устойчивому положению), когда период пульсаций становится соизмеримым с постоянной времени исполнительного элемента. У прецизионных тахогенераторов амплитуда пульсаций достигает 0,1-*-1% от среднего напряжения. К преимуществам тахогенераторов постоянного тока относятся возможность получения высокой линейности выходной характеристики
|