
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока кретного углового положения датчика, а определяется только углом рассогласования. График зависимости синхронизирующего момента от угла рассогласования показывает, что сельсин имеет две точки согласованного положения (0=0; 0=180°). В этих точках момент равен нулю и, казалось бы, это противоречит основному свойству сельсинов - самосинхронизации в пределах одного оборота. Но эти положения не равнозначны: одно из них соответствует устойчивому равновесию 0=0, другое - неустойчивому 0=180°. Рассмотрим это на примере двух магнитов. Если между двух полюсов магнита поместить другой магнит, то можно указать два положения, при которых момент равен нулю: 1) когда магнит обращен к другому разноименными полюсами (устойчивое равновесие) и 2) когда магнит обращен к другому одноименными полюсами (неустойчивое равновесие). При числе пар полюсов р>1 число точек устойчивого равновесия равно р (например, 0=0 и 180° при. р=2; пунктирная линия на рис. 4.6, б) и передача угла неоднозначна. Важнейшей характеристикой сельсина является удельный синхронизирующий момент. Под ним понимают величину синхронизирующего момента, приходящегося на один градус угла рассогласования в начале характеристики, т. е. удельный синхронизирующий момент есть крутизна начального участка угловой характеристики: \, де ] или М,=(] . (4.20) В случае однотипных датчика и приемника величину удельного момента можно определить по формуле Жуд, Н-м/град=20,8-10-* --5252, (4.21) где Rg, - активное и индуктивное сопротивления обмотки синхронизации по поперечной оси; / - частота напряжения сети. В индикаторном режиме передача угла происходит со статической угловой погрешностью. При работе без нагрузки погрешность, вызванная собственным моментом трения. М. сельсина-приемника, является основной и характеризует величину зоны нечувствительности приемника, в пределах которой ротор приемника может занять любое положение при одном и том же положении датчика. Величина этой зоны определяется отношением собственного момента трения сельсина-приёмника к удельному синхронизирующему моменту (рис. 4.6, б): В, град=Лг/Муд (4.22) и она тем 5же, чем больше величина Ж уд. У сельсинов различных размеров удельный синхронизирующий, момент равен (l-v-50)-10 * Н-м/град. В зависимости от величины статической погрешности Д0 сельсины, работающие в индикаторном режиме, подразделяют на четыре класса точности. У сельсинов высшего класса точности статическая погрешность не превышает ±30, у сельсинов низшего класса достигает +90 [18]. Для всех классов точности погрешность приемника значительно больше погрешности датчика. Погрешность датчика обусловлена в основном технологическими факторами (асимметрия обмоток, неравномерность магнитной проводимости по осям и т. д.), а на погрешность приемника дополнительно влияют моменты трения в подшипниках и в контактном узле щетки - кольца, момент статического небаланса ротора, зубцовые реактивные моменты и т. д. В процессе эксплуатации на точность передачи влияют колебания напряжения и частоты питающей сети и сопротивление линии связи сельсинов: Уменьшение напряжения и увеличение частоты ~ uUsLnwt 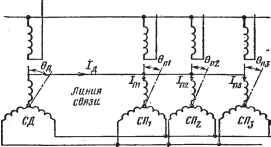 Рис. 4.7. Схема сельсинов при многократном приеме приводят к уменьшению потока возбуждения Ф. Увеличение расстояния между сельсинами и сопротивления линии связи снижает величину тока в обмотках синхронизации и м. д. с. Fmax- Как видно из (4.19), в обоих случаях уменьшается синхронизирующий момент и точность передачи. Резкое снижение точности передачи наступает при появлении момента нагрузки на валу приемника (рис. 4.6,6, Л1ст = Лт + Л агр)- V в ряде случаев Сельсины в индикаторном режиме работают при непрерывном вращении. Синхронизирующий момент, называемый при этом динамическим, является функцией скорости вращения, так как э. д. с. вращения, наводимая в обмотках синхронизации, снижает его величину. Значение динамического синхронизирующего момента Меди , развиваемого сельсином-приемником, можно найти по эмпирической формуле [4] . ; (4.23) Лс.дин = Листах SinGcOS где ю - скорость вращения ротора приемника; Метах - максимальный статический синхронизирующий момент. Динамический синхронизирующий момент при малых углах рассогласования (0<5°) и скорости от нуля до 0,2 синхронной, соот- ветствующей данной частоте, практически равен статическому. Дальнейшее увеличение скорости приводит к существенному уменьшению динамического синхронизирующего момента. Иногда требуется передать на расстояние угловую величину не в одно, а в несколько мест. Например, когда положение какого-либо регулирующего органа необходимо передать на главный пульт управления и местные наладочные Пульты и т. д. Тогда к одному датчику подключают несколько сельсинов-приемников. Такой режим называют многократным приемом (рис. 4.7). Пусть к датчику подключено п однотипных с ним приемников. Согласно (4.19) синхронизирующий момент пропорционален м. д. с. Jmax последняя В СВОЮ очередь пропорциональна току обмотки син- 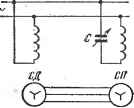 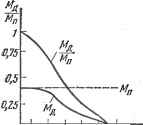 ) € Ш £0 30 40 50 60 Ji Рис. 4.8. Схема индикаторного режима с компенсацией момента датчика Так как приемники подключены к датчику парал- хронизации / . лельно, то синхронизирующий момент приемника будет в п раз меньше момента датчика, поскольку max тах/- В силу снижения моментов у сельсинов-приемников точность передачи будет значительно снижена. Для того чтобы сохранить синхронизирующий момент приемников, выбирают сельсин-датчик в п раз мощнее сельсинов-приемников, т. е. сопротивление его обмотки синхронизации будет в п раз меньше сопротивления обмотки синхронизации каждого сельсина-приемника. В общем случае (4.24) где Муд.о - удельный момент при работе одного приемника от однотипного датчика;
|