
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока с увеличением м. д. с. в ЭМУС увеличивается коэффициент усиления по мощности kp по сравнению с ЭМУ независимого возбуждения. При одинаковых плотностях тока и средней длине витка обмоток управления в обоих усилителях мощности управления находятся в соотношении [2] у.нез у.не где Ру, Fy - мощность и м. д. с. управления ЭМУС; Ру.нез. Ру пез - мощность И м. Д. С. управлсния ЭМУ независимого возбуждения. Для создания одинаковой выходной мощности й обоих усилителях необходимо, чтобы Ру.н<.з=Рв. где определяется по (1.3). Тогда с учетом (1.5) получаем Рнез . . Pv Fy Ру.нбз у.нез f кр-=кркрпез. (1.6) где fep нез - коэффициент усиления по мощности ЭМУ независимого возбуждения. Из равенств (1.5) и (1.6) видно что чем ближе угол наклона вольт-амперной характеристики обмотки самовозбуждения к .ар, тем больше коэффициент усиления по мощности усилителя, В критическом случае, когда а-ар, коэффициент усиления kp=oo. В случае а<акр ЭМУС становится практически неуправляемым из-за произвольного самовозбуждения при отсутствии сигнала на обмотке управления. Вследствие того что магнитопровод усилителя имеет остаточное поле, выбирать значение а достаточно близким к ар нельзя, так как может произойти самовозбуждение. Поэтому в реальных усилителях угол наклона вольт-амперной характеристики выбирают на 3-5% больше критического угла наклона характеристики E=f{F). При таких параметрах коэффициент усиления по мощности ЭМУС достигает порядка 1500-2000. Для определения динамических свойств ЭМУ с самовозбуждением (параллельным) рассмотрим процесс самовозбуждения машины в режиме холостого хода: Допустим, что характеристика намагничивания линейна (прямая линия OA рис. 1.2, б), скорость вращения генератора постоянна, вихревые токи малы, индуктивность и сопротивление обмотки якоря значительно меньше, чем обмотки самовозбуждения. Пусть на обмотку управления подано напряжение Uy (см. рис. 1.1, а). Тогда для ЭМУС можно записать следуюише уравнения равновесия э. д. с. Для обмотки управления где iy, -с - гокк в обмотках управления и самовозбуждения; Ly, Яу - индуктивность и активное сопротивление обмотки управления; М - взаимоиндуктивность между обмотками управления и самовозбуждения. Для цеп и. самовозбуждения e,=i,K + L,+M% (1.8) at dt где е - э. д. с. якоря; Ь, Rc - индуктивность и активное сопротивление обмотки самовозбуждения. Величину э. д. с. якоря можно определить из треугольника АОВ (рис. 1.2,6): e=iBtga p=( fy-bOKp. (1-9) где 1в=у+с - эквивалентный ток возбуждения, соответствующий м. д. с. F; iy==kpiy - ток управления, приведенный к числу витков обмотки самовозбуждения; kp=Wy/Wc - коэффициент трансформации между обмотками; Kp=tgaKp=£5, B - критическое сопротивление контура возбуждения. Будем считать, что между обмотками управления и самовозбуждения существует полное магнитное сцепление, т. е. M = j/Z. (1.10) Тогда можно записать Lyk%L; M = Lkp, LykM. (1.11) Представим уравнения равновесия э. д. с. (1.7) и (1.8) в операторной форме. Для этого предварительно преобразуем члены этих уравнений с учетом ,(1.9)-(1.11): Lypiy+Mpi=kpMpiy + Mpi=Mp ( iy+Q=-pe; Lj)ic+Mpiy=Lpic+KpLpiy=Upik + iy)=-~-pe , (1.12) где p=d/dt - оператор. В результате преобразования уравнения равновесия э. д. с. можно записать в виде уу + Ря-у. (1-13) Rcic+-P.-e,=0. (1.14) Решая систему уравнений (1.13), (1.14) с учетом (1.5) и (1.9), получаем дифференциальное уравнение э. д. с. якоря НИИ (1.5) tg KP Kp в выраже- tga Rc e, + k,iTy-i-T,)pe,==kjrbU (1.15) где Гу=£у ?у и Тс= Lc ?c - электромагнитные постоянные времени цепей управления и самовозбуждения. Если учесть, что в начальный момент времени {t=0) э. д. с. якоря также равна нулю, решение уравнения (1.15) примет вид (1.16) Согласно уравнению (1.16), если к обмотке управления ЭМУС приложить напряжение управления и у, то процесс нарастания э. д. с. усилителя идет по экспоненциальному закону (сплошная линия на рис. 1.3) с эквивалентной постоянной времени r=kr(Ty+T,). (1.17) Сравнение выражений (1.6) и (1.17) показывает, что увеличение коэффициента усиления kp за счет роста kp приводит одновременно к снижению быстродействия ЭМУС. Так как в усилителях k > 1, то эквивалентная постоянная времени Т значительно превышает сумму постоянных времени обмоток самовозбуждения и управления. Поэтому ЭМУС используют в тех случаях, когда не требуется большое быстродействие. Установившееся значение э. д. с. усилителя определяют в соответствии с (1.16) 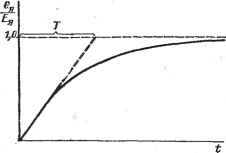 Рис. 1.3. Переходная характеристика ЭМУ с самовозбуждением: - - кривая нарастания э. д. o.i -----касательная к кривой нарастания 9. д. о. в начале координат *тркр (1.18) Из выражения (1.18) можно найти коэффициент усиления по напряжению усилителя (1.19) Уравнение (1.15) с учетом (1.17) - (1.19) можно записать в виде e +Tpe,=kUy.. (1.20) Отсюда видно, что ЭМУС представляет собой апериодическое звено с передаточной функцией Uy Тр+1 (1.21)
|