
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока Схема (рис. 4.14) работает следующим образом. В качестве датчика СД используют обычный сельсин, в качестве приемника СП- сельсин-двигатель. При согласованном положении сельсинов магнитные потоки возбуждения и синхронизации СП направлены по про- 3 г 1 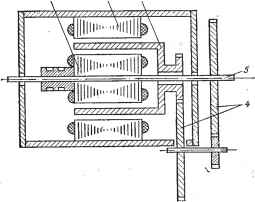 Рис. 4.13. Схема конструкции совмещенного сельсина-двигателя дольной оси. Результирующее поле совмещенной машины - пульсирующее, полый ротор неподвижен. Если задать на- сельсине-датчике какое-либо угловое перемещение, то в сельсинах появляется поперечный магнитный поток, созданный поперечными составляющими м. д. с. обмоток синхронизации 2 (см. индикаторный режим в § 4.3). В совмещенном сельсине-двигателе теперь образуются два 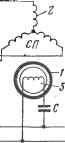 магнитных потока и Ф, имеющих пространственный и временной (за счет емкости С) сдвиги. Результирующее поле - вращающееся. Полый ротор /, как в обычном асинхронном двигателе, начинает вращаться и разворачивать на заданный угол объект управления. Одновременно через редуктор поворачивается внутренний статор 3 сельсина-двигателя, уменьшая рассогласование. Отработка угла прекращается, когда угол рассогласования между сельсинами станет равным нулю, так как результирующее поле СП вновь станет пульсирующим. Из изложенного ясно, что в совмещенном сельсине-двигателе использован пространственный способ регулирования скорости испол- Рис. 4.14. Схема синхронной связи с совмещенным сильсином-двига-телем нительных асинхронных двигателей. При такой схеме работы сельсинов удалось получить удельный синхронизирующий момент на выходном валу сельсина-приемника порядка 1 И-м/град, что значительно превышает момент, развиваемый обычными сельсинами. Усиление момента происходит за счет мощности, потребляемой обмоткой возбуждения сельсина-двигателя из сети. § 4.7. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ СЕЛЬСИНОВ В ИНДИКАТОРНОМ РЕЖИМЕ При работе в индикаторном режиме момент сопротивления на валу сельсина-приемника имеет статическую Мг и динамическую Мд составляющие: Меопр = Лст + Мд . (4.31) . Статический момент сопротивления состоит из собственного момента трения /Ит (момента холостого хода) и момента нагрузки М ,гр: . /Ие,=М,+М р. (4.32) Величина динамического момента определяется моментом инерции ротора J и ускорением: Ai H=-/f?. (4.33) где 0 - угол поворота ротора сельсина-приемника. При ступенчатом изменении угла поворота ротора сельсина-датчика ротор сельсина-приемника некоторое время совершает колебания относительно нового положения устойчивого равновесия. Уравнение равновесия моментов на валу сельсина-приемника в этом режиме при Л1нагр=0 имеет вид /Ие=/Ид -Ь/Иде +/И (4.34) где Мс - статический синхронизирующий момент; /Идем - демпферный электромагнитный момент. Знак перед моментом трения Mj в (4.34) зависит от направления скорости вращения. Величину статического синхронизирующего момента в зоне малых углов рассогласования (sin0 O) можно определить с учетом (4.18) и (4.20) как М,=-Мув. (4.35) Знак минус в (4.35) означает, что синхронизирующий момент всегда направлен в сторону уменьшения угла рассогласования. Электромагнитное демпфирование колебаний происходит за счет наведения э. д. с. вращения в обмотках синхронизации сельсина-приемника, что вызывает дополнительные токи и демпфирующий момент, аналогичный моменту асинхронного двигателя. Однако демпфирующего действия обмоток синхронизации обычно недостаточно и для ускорения затухания колебаний на роторе располагают ко-роткозамкнутую демпферную обмотку (кроме бесконтактных сельси- нов с униполярным возбуждением). Магнитная ось этой обмотки перпендикулярна оси обмотки возбуждения и при колебаниях роторамагнитный поток обмотки синхронизации наводит в ней э.д. с. вращения, по обмотке текут токи и во взаимодействии с вызвавшим их потоком создают демпфирующий момент. Результирующий демпфирующий момент пропорционален скорости врагцения ротора сельсина-приемника: Л ем = 0~, (4.36) где D - коэффициент демпфирования, величина и знак которого зависят от параметров сельсинов. Подставляем (4.33), (4.35) и (4.36) в (4.21) и получаем уравнение колебаний ротора сельсина-приемника: Выражение (4.37) можно преобразовать с учетом{4.22): +2Х- + о)о(е±В)=0, (4:38). dt dt где В - зона нечувствительности; k=DI2J - коэффициент затухания колебаний; a-\/MypJJ -угловая частота свободных колебаний ротора. Если зона нечувствительности значительно меньше начальной амплитуды Go, т. е. ВСбо, то решение уравнения (4.38) приобретает вид (4.39) , 2,3, 1+(1 6) -я- где 6=е ° - декремент затухания; 4ат - время затухания колебаний ротора приемника. Если пренебречь моментом трения (Mt=0 и 5=0), то характеристическое уравнение выражения (4.38) будет иметь вид ХН2?.Х+ 0)0=0. (4.40) Корни этого уравнения X ,=-l±Vk-l. (4-41) В зависимости от соотношений угловой частоты свободных колебаний и коэффициента затухания % переходный процесс может быть апериодическим, если ?i>cOo. критическим апериодическим, если ?i,==cOo, и колебательным, если %<1й. Чем больше коэффициент демпфирования D, тем больше коэффициент затухания к. Увеличивая демпфирование, можно перевести сельсин из колебательного режима в апериодический. При недостаточной эффективности электромагнитного демпфирования на валу
|