
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока Полная э. д. с, индуктируемая в обмотке рр., представляет собой сумму э. д. с. взаимоиндукции и самоиндукции: £р1=£р1м+£pii = Tpci sin 0- /Mi/pi (Шр cos 6)2 Л. (5.8) Ток ротора /;i=-%-. (5.9) где Zpi=/?pi + /Xpi -сопротивление обмотки р-р. Из (5.8) с учетом (5.9) находим V4.sine gjQ i+bcose где комплексный множитель bi--=/----. (5.П) 2нагр1+2р1 (Harpi+/?pi)+/ (Harpi+-Xpi) Из уравнения (5.10) следует, что при нагрузке синусного поворотного трансформатора происходит искажение синусоидального характера зависимости Е-у от угла 0, так как в знаменателе содержится бсозб. Физически это искажение обусловлено появлением при нагрузке поперечного потока Фрх, т. е. поперечной реакцией ротора. Для уменьшения искажения необходимо уменьшить значение множителя Ь, что может быть достигнуто при больших сопротивлениях нагрузки. , Относительная погрешность определяется как разность между уравнением идеальной синусоиды с амплитудой xpci и выражением (5.10), отнесенная к .амплитуде идеальной синусоиды - трЁс! sin е k-tpEcx sm е - - л с- l+bCOSe 6 COSе sin 0 /с 10Ч Д£р=--=--. (5.12) fexpfici i-i-bcos=e Исследование выражения (5.12) на максимум показывает, что угол, при котором погрешность достигает максимального значения 0тах=35°16; 144Ч4; 215°16... Действительная часть комплекса А£р принимается за амплитудную погрешность, а мнимая - за фазовую погрешность поворотного трансформатора. Характер искажения амплитуды выходного напряжения поворотного трансформатора под действием поперечной реакции ротора показан на рис. 5.5, где кривая / - идеальная синусоида, кривые 2 и 3 - выходные характеристики поворотного трансформатора по (5.10) при значениях 6, равных соответственно 0,25 и 1. Кривые 4 и 5 представляюг собой зависимость амплитудной погрешности Д£р от угла поворота ротора при указанных значениях b и соответствуют выражению (5.12). Графически кривая 4 получается как разность кривых 1 и 2, а кривая 5 - соответственно 1 я 3. Возникновение фазовой погрешности обусловлено активно-индуктивным характером сопротивлений обмоток поворотного трансформатора и поперечной реакцией ротора. Математическим признаком наличия фазовой погрешности является то, что множитель b в выражениях (5.12) и (5.10) есть величина комплексная. Анализ выражения (5.11) показывает что при изменении величины или характера нагрузки (соотношения i? arpi и Harpi) и при изменении угла поворота ротора меняется аргумент комплекса знаменателя в (5.10). Следовательно, изменяется и сдвиг по фазе между векторами Е и ci. т. е. появляется фазовая погрешность. Из выражения (5.11) видно также, что для уменьшения фазовой погрешности необходимо увеличивать долю индуктивного сопротивления (X ,arpi-bXpi) в полном сопротивлении цепи ротора (ZHrpi-bZpi), так как при этом резко уменьшается аргумент комплекса Ь. Наименьшая фазовая погрешность соответствует чисто индуктивной или чисто емкостной нагрузке, но при этом амплитудная погрешность достигает наибольшей величины [4]. Аналогичным образом можно рассуждать и в том случае, когда рабочей обмоткой ротора является обмотка PsP, а обмотка рр. разомкнута. При этом взаимоиндуктивность между обмотками сс. и РзР подчиняется косинусоидальному закону и машина превращается в косинусный поворотный трансформатор, для которого э. д. с. ротора при холостом ходе  Рис. 5.5. Ампл1тудная погрешность синусного поворотного трансформатора при нагрузке £p3=ft p£ciCOS0 (5.13) и при нагрузке Р /JTpgci COS е --: 1+Ь sine (5.14) Поскольку выходное напряжение поворотных трансформаторов должно строго подчиняться закону синуса или косинуса угла поворота ротора, то приходится прибегать к так называемому симметрированию, т. е. устранению погрешности от поперечной реакции ротора путем компенсации этой реакции. Симметрирование поворот- ных трансформаторов является также радикальным средством снижения фазовой погрешности. § 5.4. СИММЕТРИРОВАНИЕ ПОВОРОТНЫХ ТРАНСФОРМАТОРОВ Симметрирование поворотных трансформаторов осуш:ествляется либо со стороны статора - первичное симметрирование, либо со стороны ротора - вторичное симметрирование. При первичном симметрировании поворотного трансформатора используется вспомогательная статорная обмотка CgCj, которая замыкается на внешнее сопротивление Z2 (рис. 5.6, а). Так 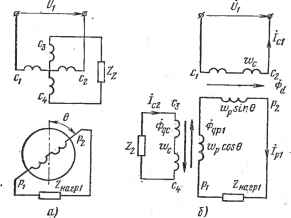 Рис. 5.6. Схемы синусного поворотного трансформатора с первичным симметрированием; а - принципиальная; б - эквивалентная как ось обмотки с перпендикулярна оси обмотки сс, то витки этой обмотки Wf. (рис. 5.6,6) и поперечные витки роторной обмотки Р1Р2 представляют собой трансформатор, первичная обмотка которого расположена на роторе, а вторичная - на статоре. Ток /р, протекая по поперечным виткам ШрСозб обмотки рра. создает магнитный поток, сцепленный с витками ебмотки С3С4. В ней индуктируется трансформаторная э. д. с. и течет ,ток /з. Величина результирующего поперечного потока определяется геометрической суммой потоков Фр1 и Фс обеих обмоток. При малом значении режим трансформатора близок к короткому замыканию и взаимное размагничивающее действие обеих обмоток настолько велико, что величина результирующего поперечного потока Ф стремится к нулю при любом значении сопротивления нагрузки Z i. Можно доказать, что влияние поперечной реакции ротора исчезает полностью, если включить в обмотку сс сопротивление ZZ, где Z - внеш-
|