
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока М. д. с. обмоток CiCa и С3С4 создают неподвижные в пространстве, пульсирующие по осям обмоток магнитные потоки Ф и (рис. 5.14,6). модули которых при отсутствии насыщения магнитопровода будут пропорциональны вызвавшим их напряжениям Ui и f/c2- В результате геометрического сложения этих потоков возникает результирующий магнитный поток Ф3, расположенный в пространстве относительно обмоток сс и СдС* под теми же углами, что и гипотенуза а исходного треугольника. Очевидно, что величины 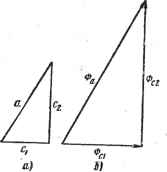 Рис. 5.14. Пространственная диаграмма потоков в поворотном трансформаторе-построителе 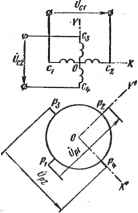 Рис. 5.15. Поворотный трансформатор как преобразователь координат потоков Фс1< Фс2, Фа пропорциональны сторонам Cji, Са и а треугольника. Магнитный поток Ф наводит в обмотках ротора э. д. с. £р, и £р2. Э. д. с. Ера обмотки рзР4 создает на зажимах обмотки управления исполнительного двигателя напряжение U. Ротор двигателя начинает вращаться и через редуктор поворачивать ротор поворотного трансформатора. Когда обмотка рр займет положение, при котором ее ось будет перпендикулярна оси магнитного потока Фд, э. д. с. этой обмотки станет равной нулю и ротор исполнительного двигателя остановится. При этом ось обмотки рр совпадет С осью потока Фд и вольтметр покажет напряжение максимально возможной величины, которое и будет пропорционально гипотенузе а исходного треугольника. Угол поворота ротора будет определять угловое положение гипотенузы относительно катетов. Выполненная поворотным трансформатором операция соответствует определению величины вектора и его аргумента по заданным составляющим в прямоугольной (декартовой) системе координат. Это означает, что поворотный трансформатор-построитель может выполнять преобразование от декартовых к полярным координатам. С помощью поворотного трансформатора можно легко решать задачу преобразования от одной декартовой системы координат к другой при прврроте их осей (рис. 5.15). Совместим оси координат ОХ и 0Y исходной системы с обмотками статора, а повернутую на угол 9 систему координат ОХ и 0Y - с осями обмоток ротора. При подаче на обмотки статора сс и сс напряжений Ux и значения напряжений на обмотках ротора* будут определяться взаимоиндукцией с обеими статорными обмотками. В соответствии с (5.4) и. (5.23) можно записать fpi=£7 (с1 sin е -ь cos е); (5.34) tp2=t7 (ci cos e - L/ sin e). (5.35) Полученные соотношения дают с точностью до масштабного коэффициента известные формулы преобразования координат. Следует отметить, что симметрирование поворотного трансформатора в схеме построителя осуществляется за счет того, что каждая статорная обмотка- является не только индуктирующей по отношению к обмоткам ротора, но и компенсирующей по отношению к другой статорной обмотке. § 5.6. ПОГРЕШНОСТИ ПОВОРОТНЫХ ТРАНСФОРМАТОРОВ Поворотные трансформаторы обычно работают в устройствах и приборах высокой точности, где вопрос погрешностей является одни.м из основных. Погрешности преобразования углового перемещения в напряжение у поворотных трансформаторов в зависимости от их физической природы можно подразделить на четыре группы 118]. 1. Погрешности, определяемые принципом работы в данном режиме. У синусно-косинусных поворотных трансформаторов - это отклонение выходной характеристики от синусоидальной вследствие неточности симметрирования [выражение (5.12)1, у линейных - отклонение выходной характеристики от линейной вследствие неточности аппроксимации [выражения (5.26) и (5.32)1. 2. Погрешности, определяемые конструкцией. Они вызываются в основном несинусоидальностью распределения м. д. с. обмоток вдоль окружности машины, изменением магнитного сопротивления воздушного зазора вследствие наличия пазов на поверхностях статора и ротора, нелинейностью кривой намагничивания и явлением гистерезиса. Уменьшение этих погрешностей достигается путем применения специальных синусных схем обмоток, за счет скоса пазов статора или ротора на 1-1,5 зубцовых деления, выполнения магнитопровода поворотного трансформатора ненасыщенным. 3. Погрешности, определяемые технологией изготовления. Основными источниками этих погрешностей являются эксцентриситет расточек статора и ротора, асимметрия магнитопровода, неточность расположения и скоса пазов, наличие короткозамкнутых витков в обмотках и листов в магнитопроводе, ошибки при выполнении обмотки. Для уменьшения этих погрешностей требуется устанавливать жесткие допуски.на эксцентриситет и эллиптичность статора и ротора. Сборку пакетов статора и ротора следует производить веерным, способом с учетом магнитной анизотропии листов. Не допускать возникновения короткозамкнутых витков и листов или несовпадения чисел витков в обмотках. Влияние технологических погрешностей можно представить как появление некоторой добавочной э. д. с. ДЁдоб в выходных обмотках. Э. д. с. АЕдоб имеет в общем случае две составляющие: э. д. с. (напряжение) ошибки ДЕош. совпадающую по фазе с выходной э. д. с. и остаточную э. д. с. Д£ост, сдвинутую по фазе на 90°. При этом в расчетных точках с нулевым выходным напряжением (нулевых точках) э. д. с. становится отличной от нуля. 3. д. с. ошибки ДЕош может быть скомпенсирована основной выходной э. д. с. путем дополнительного гюворота ротора на угол, при котором £ ых = - ДЕош. т. е. обусловливает асимметрию нулевых точек. Асимметрия характеризует в. .основном неперпендикулярность обмоток статора и ротора. Остаточная э. д. с. Д£ост не компенсируется дополнительным поворотом ротора. Поэтому в поворотных трансформаторах выходное напряжение никогда не обращается в нуль в пределах оборота, а лишь приобретает некоторое минимальное значение. Технологические погрешности приводят также к тому, что обмотки статора (ротора) оказываются неперпендикулярными. При этом поток возбуждения наводит э.д. с. во вспомогательной (квадратурной) обмотке. 4. Погрешности, определяемые условиями эксплуатации. При изменении температуры окружающей среды меняется активное сопротивление обмоток. Колебания частоты напряжения сети вызывают изменение индуктивных сопротивлений. Изменение амплитуды напряжения сети автоматически сказывается на величине выходного напряжения. Класс точности поворотных трансформаторов устанавливается для нормальных условий эксплуатации. При определении класса точности поворотных трансформаторов учитываются следующие показатели: 1) ошибка в выработке синусоидальной (косинусоидальной) зав1и-симости для синусно-косинусного поворотного трансформатора в процентах от максимального выходного напряжения (выхтах; 2) ошибка в выработке линейной зависимости для линейного поворотного трансформатора в линейной зоне в процентах от (Удих так. соответствующего концу линейной зоны; 3) асимметрия нулевых точек в угловых единицах, под которой понимается максимальное отклонение углов с минимальным напряжением выходных обмоток от расчетных О, 90, 180 и 270°; . 4) максимальное значение э. д. с. в квадратурной обмотке в процентах от напряжения возбуждения Ui при разомкнутых роторных обмотках; 5) остаточная э. д. с. в нулевых точках в процентах от напряжения возбуждения Ui.
|