
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока ЛПТ-, усилителя 5У и исполнительного двигателя с редуктором ЯД. Сигнал на усилитель поступает из узла сравнения С, а выходное напряжение подается на обмотку управления ЯД. Вал исполнительного двигателя механически связан с ротором ЛПТ. Работа множительного устройства заключается в следующем. Ввод переменных сомножителей осуществляется поворотом роторов ЛПТ и ЛПТ. ротор ЛПТ поворачивается на угол, пропорциональный X, а ротор ЛПТ2 - на угол, пропорциональный Y. Тогда в соответствии с принципом работы линейных поворотных трансформаторов напряжение на выходе первого каскада равно ИХУ. На выходе второго каскада напряжение равно LlJ(Z, где Z - величина, пропорциональная углу поворота ротора ЛПТд. Если напряжение UiKZ не равно иХУ, то в узле сравнения образуется напряжение рассогласования, поступающее на вход усилителя. Усиленное напряжение подается на ЯД, который поворачивает ротор ЛПТ;,. Отработка угла происходит до тех пор, пока не устанавливается равенство UXYUiKZ. (5.45) wry-л UjKZ ид --> Рис. 5.19. Структурная схема автоматического умножающего устройства Из (5.45) получаем (5.46) где 1 С - масштаб умножения. На основании уравнения (5.46) можно утверждать, что угол поворота ЛПТз автоматически устанавливается пропорциональным произведению переменных X и У. Выбирая тип поворотных трансформаторов и определяя места их расположения в схеме счетно-решающего устройства, следует руководствоваться следующим 112]: 1. При построении счетно-решающего каскада необходимо произвести первичное или вторичное симметрирование всех его элементов. 2. Поскольку входное сопротивление линейных поворотных трансформаторов с первичным симметрированием не постоянно, то такие ЛПТ желательно включать в начале каскада. По этой же причине нежелательно последовательное включение двух ЛПТ. 3. Так как входные напряжения поворотных трансформаторов, находящихся в середине каскада, могут изменяться в широких пределах, магнитопроводы их должны быть выполнены из пермаллоя. Магнитопроводы поворотных трансформаторов, находящихся в начале каскада, могут быть из электротехнической стали. 4. Для получения высокой точности работы схемы необходимо, чтобы при каскадном соединении поворотных трансформаторов входное сопротивление Za каждой последующей машины было примерно в 30-40 раз больше выходного * сопротивления Zbxi предыдущей машины. Если учесть, что при k, близком к единице, то для выполнения указанного условия соотношение между величинами входных сопротивлений машин, соединяемых в каскад, должно быть Поэтому основные типы поворотных трансформаторов выпускают в виде серий с градацией по входному сопротивлению Z. 5. При преобразованиях напряжений во всех поворотных трансформаторах образуются фазовые сдвиги вторичных напряжений относительно напряжений питания. В случае их каскадного соединения происходит накопление фазовых погрешностей. Поэтому напряжения, поступившие в элемент сравнения по разным цепям, могут оказаться не совпадающими по фазе. А так как их полная компенсация невозможна, снижается точность работы вычислительного устройства. Следовательно, должны быть предусмотрены меры взаимного фазирования сигнальных напряжений. Напряжение каскада фазируют обычно только в конце каскада. Рассмотрим возможность применения поворотного трансформатора в устройствах электронной промышленности на примере траекто-графа МИФИ (схема приведена на рис. 5.20). Такие траектографы автоматически вычерчивают траектории заряженных частиц в электрических и поперечных магнитных полях, не поддающихся аналитическому расчету. Знание этих траекторий необходимо при разработке и конструировании электронно-лучевых приборов. Траектограф состоит из электролитической ванны, в которой устанавливается модель исследуемой системы электродов; решающего устройства с самодвижущейся кареткой и электронными блоками; двухштырькового зонда, перемещающегося в ванне. Каретка имеет два опорных свободно вращающихся колеса 2 и одно направляющее колесо /, которое может поворачиваться относительно продольной оси У каретки. На оси опорных колес установлен отметчик 3, вычерчивающий кривую. Каретка получает поступательное движение на плоскости от непрерывно вращающегося приводного двигателя. Согласно рис. 5.20 мгновенный радиус кривизны кривой, вычерчиваемой отметчиком: г=-. (5.47) где G - угол поворота плоскости направляющего колеса по отношению к продольной оси каретки. Зонд с помощью механического координатного устройства связан с кареткой так, что он непрерывно перемещается и плоскость его измерительных штырьков все время параллельна оси направляющего колеса каретки и нормальна к направлению движения (вектору скорости V). Зонд непрерывно измеряет две величины: U - пройденную разность потенциалов и £ - нормальную к траектории составляющую напряженности электрического поля. Эти величины опреде,ггяют мгновенный радиус кривизны траектории заряженной частицы в поле г=. . (5.48) 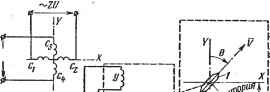 Зоид I {Каретка Рис. 5.20. Схема траектографа МИФИ Из уравнений (5.47) и (5.48) видно, что отметчик каретки вычертит кривую, совпадающую с траекторией заряженной частицы, движущейся в моделируемом поле, если в любой точке поля будет удовлетворяться уравнение (5.49) tge En Это уравнение, преобразованное к виду 2(У sin е=6£ cose, (5.50) является основным уравнением траектографа. Автоматическое решение уравнения (5.50) производится поворотным трансформатором ПТ и исполнительным асинхронным двигателем ЯД, управляющим поворотом колеса, которые расположены на самодвижущейся каретке. Измеренные зондом в ванне величины U и Е после усиления электронными усилителями при введении необходимых коэффициентов и временных сдвигов подводятся к поворотному трансформатору. На обмотки CiC и СдС статора ПТ поступают напряжения, пропорциональные соответственно 2U и ЬЕ и сдвинутью относительно друг друга на 180°. В соответствии с (5.34) с обмотки рра ротора снимается напряжение Pi=* (2t/sine-i-6£ cose). (5.51)
|