
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока обмотка подмагничивания 5 На спинке большого паза расположена обмотка размагничивания 6. Так как у ЭМУ поперечного поля имеется остаточное напряжение за счет гистерезиса, то для устранения этого явления обычно применяют размагничивание статора переменным током, чему й служит обмотка размагничивания 6. Такая конструкция статора и якоря является наиболее распространенной для ЭМУ мощностью до 20 кВт. Якори ЭМУ приводятся во вращение приводными двигателями постоянного и переменного тока, выполненными в одном корпусе с ЭМУ или раздельно. На рис. 1.6, а показан внешний вид ЭМУ поперечного поля УДМ-150 с приводным двигателем постоянного тока в одном корпусе; на рис. 1.6,6 - детали этого усилителя. § 1.4. СТАТИЧЕСКИЕ И ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРОМАШИННОГО УСИЛИТЕЛЯ ПОПЕРЕЧНОГО ПОЛЯ Важнейшим показателем ЭМУ поперечного поля является коэффициент усиления по мощности. Высокий коэффициент усиления по мощности получается за счет того, что ЭМУ поперечного поля является двухступенчатым. Первая ступень усиления: обмотка управления - короткозамкнутая цепь поперечных щеток. Вторая ступень: короткозамкнутая цепь поперечных щеток - выходная цепь продольных щеток. Поэтому общий коэффициент усиления по мощности kp=kpykp2, (1.26) где kp\ - коэффициент усиления 1-й ступени; kp - коэффициент усиления 2-й ступени; - причем ftn=; kp2=. (1.27) Подставляя значения коэффициентов усиления по мощности ступеней в выражение (1.26), получим tVs, (1.28) где Ri - сопротивление обмотки управления. Коэффициенты усиления по мощности каждой ступени могут быть записаны через основные параметры машины и нагрузки. Для этого токи в продольной и поперечной цепях якоря выражаются по закону Ома через э. д. с. якоря и сопротивления, э. д. с. якоря - через скорость вращения и магнитный поток, а последний - через ток и индуктивность обмоток, создающих этот поток. При полной компенсации ЭМУ (fe==l) формула результирующего коэффициента усиления по мощности, полученная в результате указанного преобразования, принимает вид <2 1<з+<нагр) где с - конструктивный коэффициент; Л - соответственно магнитные проводимости по поперечной и продольной осям машины; /?2. 8 - соответственно активные сопротивления поперечной и продольной цепей ЭМУ; © - угловая скорость вращения якоря; Ti - =Li/7?i - постоянная времени обмотки управления; TgL/i - по- стоянная времени поперечной цепи; Li, - соответственно индуктивности обмотки управления и поперечной цепи ЭМУ. Отсюда следует, что усилитель будет иметь тем больший коэффициент усиления по мощности, чем меньше будет насыщена его магнитная 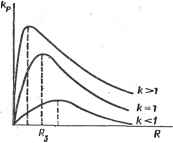 Рис. 1.7. Зависимость коэффициента ус?иления ЭМУ поперечного поля от сопротивления нагрузки цепь (больше и Л) и чем выше будет скорость вращения. Чрезмерно увеличивать скорость вращения нельзя, так как могут ухудшиться условия коммутации под продольными и поперечными щетками и условия механической прочности машины. Коэффициент усиления kp прямо пропорционален постоянным времени обмоток управления и поперечной цепи, т. е. требования максимального усиления и максимального быстродействия взаимно противоречивы. Величина коэффициента усиления по мощности весьма существенно зависит от сопротивления нагрузки и степени компенсации ЭМУ (рис. 1.7). При полной компенсации {k=V) коэффициент усиления-по мощности достигает максимального значения при соблюдении условия /?з=/? агр. т. е. общего условия для работы генератора на пассивную нагрузку. В случае перекомпенсации {k>l) за счет под-магничивающего действия разностной м. д. с. компенсационной обмотки и продольной цепи якоря коэффициент усиления по мощности больше и его максимум наступает при меньшем сопротивлении нагрузки, чем при k=\. При недокомпенсации (ft<l) все соответственно наоборот. Графики рис. 1.7 могут характеризовать и зависимость коэффициента усиления от тока нагрузки. Основньши статическими характеристиками ЭМУ поперечного поля являются внешние и регулировочные. Рассмотрим эти характеристики при отсутствии сдвига щеток с соответствующих геометрических осей Внешние характеристики - это зависимости lJs=f(h) при постоянных скорости вращения приводного двигателя (0=const и сигнале на обмотке управления 6i=const. На рис. 1.8, а представлена зависимость тока в поперечной цепи 4 от тока в продольной цепи 4, т. е. от выходного тока, протекающего через нагрузку. Характеристики построены для всех трех случаев компенсации: полной (й=1), перекомпенсации (ft>l) и недокомпенсации (k<l). При полной компенсации (ft = l) с учетом отмеченного допуще- ния по продольной оси машины действует только м. д. с. обмотки управления. Следовательно, снимаемая поперечными щетками (см. рис. 1.4, а) э. д. с. £3=const. Значит, ток при изменении сопротивления нагрузки Rp во всем диапазоне остается неизменным. При перекомпенсации (k>l) по продольной оси, кроме м. д. с, создаваемой обмоткой управления, действует еще часть м. д. с, ком-  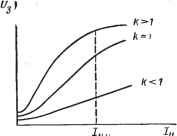 Рис. 1.8. Внешние характеристики ЭМУ попе- Рис. 1.9. Регулировочные ха-речного поля . рактеристики ЭМУ поперечного поля пенсационной обмотки, которая направлена согласно с м. д. с. обмотки управления. Поэтому величина тока 4 с ростом тока нагрузки /s растет. При недокомпенсации (А;<1) по продольной оси действует часть м. д. с. продольной реакции якоря, нескомпенсированной м. д. с. компенсационной обмотки, и поэтому ток 4 с ростом тока нагрузки /з убывает. Пользуясь этими зависимостями, можно легко настроить усилитель на необходимую степень компенсации. На рис. 1.8,6 представлены внешние характеристики U=f{I для трех случаев компенсации. При полной компенсации выходное напряжение на сопротивлении нагрузки U,=E-],R (1.30) где £3 - э. д. с. холостого хода. Напряжение на усилителе при полной компенсации (k=\) с ростом тока /д убывает и отличается от э. д. с. £3 на величину падения напряжения на внутреннем сопротивлении R продольной цепи ЭМУ. При перекомпенсации (fe>l) выходное напряжение может быть неизменным с ростом тока нагрузки /3 или даже возрастать. При недокомпенсации (й<1) выходное напряжение с ростом тока /3 уменьшается более резко, чем при k=l. Регулировочные характеристики ЭМУ - это зависимости выходного напряжения и выходного тока от тока управления при (х)= =const и 7? arp=const (рис. 1.9). Вид этих характеристик определяется формой кривой намагничивания машины. При малых токах
|
||||||||||