
|
| |
|
Главная
>
Асинхронные тахогенераторы переменного тока управления нелинейность характеристик и соответственно непостоянство коэффициента усиления объясняется наличием остаточной э. д. с. В области больших токов управления эти явления связаны с насыщением магнитной цепи. При использовании ЭМУ в замкнутых системах автоматического регулирования (стабилизаторы, регуляторы, следящие системы) машина должна бьггь несколько недокомпенсирована (*=0,970,99), так как в случае перекомпенсации в системе во время работы возникнет ложное возмущение за счет избытка м. д. с. компенсационной обмотки, которое приведет к возникновению автоколебаний системы. Динамические свойства ЭМУ поперечного поля оценивают по характеру протекания переходного процесса, т. е. по нарастанию напряжения в продольной цепи во времени Us=fii) при подаче на вход (обмотку управления) напряжения управления. Быстродействие ЭМУ в общем случае определяется постоянными времени: * 1) обмотки управления 2) поперечной цепи 3) продольной цепи, которую необходимо учитывать при работе на нагрузку, где Lg - индуктивность продольного контура обмотки якоря; 4) компенсационного контура Однако если учесть, что в реальных случаях нзгр>з. то Tg вначительно меньше трех остальных и ею можно пренебречь. На быстродействии усилителя сказывается взаимосвязь обмоток, расположенных на статоре, с обмоткой якоря и между собой, в частности, взаимодействие обмотки управления и поперечной цепи, обусловленное реакцией коммутационных токов поперечной цепи. Перемещение щеток также вызывает взаимосвязь обмотки управления с поперечной цепью и изменение характера переходного процесса. Решение уравнений переходного процесса с учетом всех взаимосвязей достаточно громоздко, а их влияние на переходный процесс во многих случаях относительно невелико. Рассмотрим закон нарастания э. д. с, в выходной цепи в функции времени для режима холостого хода с учетом главных связей в ЭМУ.114. Допустим, что: 1) магнитная система ЭМУ по поперечной и продольной осям не насыщена; 2) взаимоиндуктивность обмоток управления, компенсационной и дополнительных полюсов с обмотками поперечной цепи равна нулю. Закон нарастания э. д. с. в выходной цепи во времени в том случае, когда щетки расположены на нейтрали, можно найти из четырех уравнений равновесия э. д. с. 1) Для обмотки управления (1.31) dt df где - взаимоиндуктивность между обмоткой управления и компенсационной обмоткой; 1к - ток компенсационной обмотки. 2) Для компенсационного контура где R, - соответственно активное сопротивление и индуктивность компенсационного контура; M = Mi. 3) Для поперечной цепи якоря (1.33) где i.2 -ток в поперечной цепи; и а - коэффициенты пропорциональности. 4) Для продольной цепи якоря ез=а2Ц, (1.34) где - коэффициент пропорциональности. Величина коэффициентов а, и а определяется конструктив- гаг/ 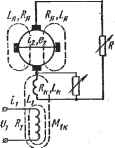 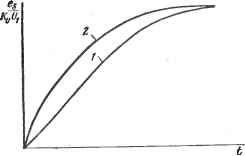 Рис. 1.10. Схема электромагнитных связей в ЭМУ поперечного поля Рис. 1.11. Динамические характеристики ЭМУ поперечного поля ными параметрами якоря, скоростью его вращения и индуктивностью соответствующих обмоток. На рис. 1.10 представлена схема электромагнитных связей в ЭМУ во время переходного процесса для рассматриваемого случая. Если принять коэффициент магнитной связи между обмоткой управления и компенсационной равным единице, то уравнения {1.31) - (1.34) можно свести к операторному уравнению .второго порядка: Й(;,=(Г1+Г,) ТфЧ,НТг + Т, + Т,)ре,-е (1.35) где fei7=aiai5/i?i/?2 -коэффициент усиления по напряжению. Решение уравнения (1.35) показывает изменение выходной э. д. с. во времени при ступенчатом приложении сигнала на вход усилителя уравнение (1.36) можно несколько упростить. Так как в усилителе T>Tl+T, то уравнение переходного процесса e=kvvX-~~). (1.37) Из выражений (1.36) и (1.37) видно, что в первом случае ЭМУ представляет собой два последовательных апериодических звена, а во втором - одно. На рис. 1.11 представлены динамические характеристики ЭМУ поперечного поля. Кривая 1 построена по уравнению (1.36), а кривая 2 - по уравнению (1.37). Передаточную функцию ЭМУ поперечного поля находят на основании уравнения (1.35): lF(p)=i=--. (1.38) § 1.5. ПРИМЕНЕНИЕ ЭЛЕКТРОМАШИННЫХ УСИЛИТЕЛЕЙ Электромашинные усилители выпускают серийно и широко применяют в системах автоматического регулирования и автоматизированного электропривода. В системах генератор - двигатель генератор, а часто и возбудитель, по существу представляют собой независимые ЭМУ, соединенные в каскад. Наибольшее распростра-. нение получили ЭМУ поперечного поля. Эти усилители имеют следующие основные преимущества: 1) большой коэффициент усиления по мощности (до 0,5-10* у ЭМУ мощностью менее 750 Вт и до 10 у ЭМУ большей мощности); 2) малую входную мощность, позволяющую питать обмотки управления от электронных ламповых и полупроводниковых усилителей; 3) достаточное быстродействие, т. е. малые постоянные времени цепей усилителя. У ЭМУ мощностью до 750 Вт эквивалентная электромагнитная постоянная времени порядка 0,1--0,2 с; 4) достаточные надежность, долговечность и широкие диапазоны изменения мощности; 5) возможность изменения характеристик путем регулирования степени компенсации. К числу недостатков ЭМУ следует отнести: 1) относительно большие габариты и вес по сравнению с генёра-горами постоянного тока той же мощности, так как для получения
|